数学3 ベクトル・極限 問題 1 解説
方針・初手
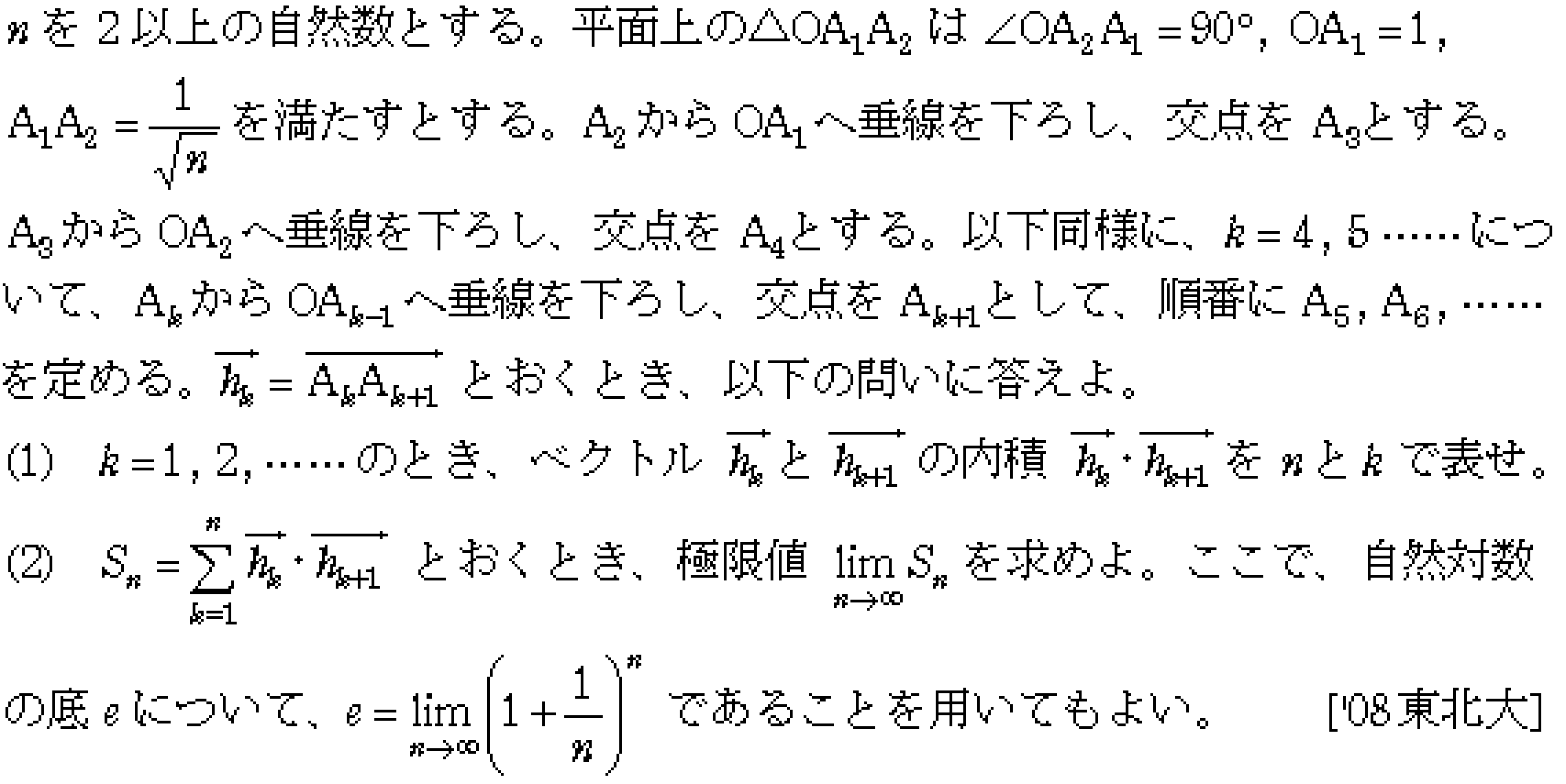
点 $A_k$ の位置ベクトルを求めるために、$\angle A_1OA_2 = \theta$ とおき、各線分の長さと方向を把握する。 点 $A_1, A_3, A_5, \dots$ は原点 $O$ を端点とする半直線上にあり、点 $A_2, A_4, A_6, \dots$ も別の半直線上にあることを利用し、単位ベクトルを用いて位置ベクトルを立式すると計算が簡明である。
解法1
$\angle A_1OA_2 = \theta$ ($0 < \theta < \frac{\pi}{2}$) とおく。
直角三角形 $\triangle OA_1A_2$ において、$OA_1 = 1$、$A_1A_2 = \frac{1}{\sqrt{n}}$ より
$$\sin\theta = \frac{1}{\sqrt{n}}, \quad \cos\theta = \sqrt{1 - \left(\frac{1}{\sqrt{n}}\right)^2} = \sqrt{1 - \frac{1}{n}}$$
直角三角形 $\triangle OA_{k-1}A_k$ において、$A_k$ から $OA_{k-1}$ に下ろした垂線の足が $A_{k+1}$ であるから、$\triangle OA_k A_{k+1}$ も $\angle OA_{k+1}A_k = 90^\circ$ の直角三角形となり、$\triangle OA_{k-1}A_k \sim \triangle OA_kA_{k+1}$ が成り立つ。
共通の角 $\angle A_{k-1}OA_k$ と $\angle A_kOA_{k+1}$ について、$O, A_1, A_3, A_5, \dots$ は同一直線上にあり、$O, A_2, A_4, A_6, \dots$ も同一直線上にあるため、これら2直線のなす角は常に $\theta$ である。
したがって、$OA_k = OA_{k-1} \cos\theta$ より、数列 $\{OA_k\}$ は初項 $OA_1 = 1$、公比 $\cos\theta$ の等比数列となり、
$$OA_k = (\cos\theta)^{k-1}$$
半直線 $OA_1$ 方向の単位ベクトルを $\vec{e}_1$、半直線 $OA_2$ 方向の単位ベクトルを $\vec{e}_2$ とおくと、
$$\vec{e}_1 \cdot \vec{e}_2 = \cos\theta$$
であり、位置ベクトル $\overrightarrow{OA_k}$ は $k$ が奇数($k=2m-1$)のとき
$$\overrightarrow{OA_{2m-1}} = (\cos\theta)^{2m-2} \vec{e}_1$$
$k$ が偶数($k=2m$)のとき
$$\overrightarrow{OA_{2m}} = (\cos\theta)^{2m-1} \vec{e}_2$$
と表せる($m$ は自然数)。
(1)
$k=2m-1$ のとき
$$\vec{h}_{2m-1} = \overrightarrow{OA_{2m}} - \overrightarrow{OA_{2m-1}} = (\cos\theta)^{2m-1} \vec{e}_2 - (\cos\theta)^{2m-2} \vec{e}_1$$
$$\vec{h}_{2m} = \overrightarrow{OA_{2m+1}} - \overrightarrow{OA_{2m}} = (\cos\theta)^{2m} \vec{e}_1 - (\cos\theta)^{2m-1} \vec{e}_2$$
内積 $\vec{h}_{2m-1} \cdot \vec{h}_{2m}$ を計算すると、
$$\begin{aligned} \vec{h}_{2m-1} \cdot \vec{h}_{2m} &= \left\{(\cos\theta)^{2m-1} \vec{e}_2 - (\cos\theta)^{2m-2} \vec{e}_1\right\} \cdot \left\{(\cos\theta)^{2m} \vec{e}_1 - (\cos\theta)^{2m-1} \vec{e}_2\right\} \\ &= (\cos\theta)^{4m-1} (\vec{e}_1 \cdot \vec{e}_2) - (\cos\theta)^{4m-2} |\vec{e}_1|^2 - (\cos\theta)^{4m} |\vec{e}_2|^2 + (\cos\theta)^{4m-1} (\vec{e}_1 \cdot \vec{e}_2) \\ &= (\cos\theta)^{4m-1} \cos\theta - (\cos\theta)^{4m-2} - (\cos\theta)^{4m} + (\cos\theta)^{4m-1} \cos\theta \\ &= (\cos\theta)^{4m} - (\cos\theta)^{4m-2} - (\cos\theta)^{4m} + (\cos\theta)^{4m} \\ &= (\cos\theta)^{4m} - (\cos\theta)^{4m-2} \\ &= (\cos\theta)^{4m-2} (\cos^2\theta - 1) \\ &= -(\cos\theta)^{4m-2} \sin^2\theta \end{aligned}$$
ここで、$2m-1=k$ より $4m-2=2k$ であるから、
$$\vec{h}_k \cdot \vec{h}_{k+1} = -(\cos\theta)^{2k} \sin^2\theta$$
次に、$k=2m$ のとき
$$\vec{h}_{2m} = (\cos\theta)^{2m} \vec{e}_1 - (\cos\theta)^{2m-1} \vec{e}_2$$
$$\vec{h}_{2m+1} = \overrightarrow{OA_{2m+2}} - \overrightarrow{OA_{2m+1}} = (\cos\theta)^{2m+1} \vec{e}_2 - (\cos\theta)^{2m} \vec{e}_1$$
同様に内積を計算すると、
$$\begin{aligned} \vec{h}_{2m} \cdot \vec{h}_{2m+1} &= \left\{(\cos\theta)^{2m} \vec{e}_1 - (\cos\theta)^{2m-1} \vec{e}_2\right\} \cdot \left\{(\cos\theta)^{2m+1} \vec{e}_2 - (\cos\theta)^{2m} \vec{e}_1\right\} \\ &= (\cos\theta)^{4m+1} (\vec{e}_1 \cdot \vec{e}_2) - (\cos\theta)^{4m} |\vec{e}_1|^2 - (\cos\theta)^{4m+2} |\vec{e}_2|^2 + (\cos\theta)^{4m+1} (\vec{e}_1 \cdot \vec{e}_2) \\ &= (\cos\theta)^{4m+2} - (\cos\theta)^{4m} - (\cos\theta)^{4m+2} + (\cos\theta)^{4m+2} \\ &= (\cos\theta)^{4m+2} - (\cos\theta)^{4m} \\ &= (\cos\theta)^{4m} (\cos^2\theta - 1) \\ &= -(\cos\theta)^{4m} \sin^2\theta \end{aligned}$$
ここで、$2m=k$ より $4m=2k$ であるから、
$$\vec{h}_k \cdot \vec{h}_{k+1} = -(\cos\theta)^{2k} \sin^2\theta$$
以上より、すべての自然数 $k$ について $\vec{h}_k \cdot \vec{h}_{k+1} = -(\cos\theta)^{2k} \sin^2\theta$ が成り立つ。
$\sin^2\theta = \frac{1}{n}$, $\cos^2\theta = 1 - \frac{1}{n}$ を代入して、
$$\vec{h}_k \cdot \vec{h}_{k+1} = - \left( 1 - \frac{1}{n} \right)^k \cdot \frac{1}{n} = - \frac{1}{n} \left( 1 - \frac{1}{n} \right)^k$$
(2)
$S_n = \sum_{k=1}^n \vec{h}_k \cdot \vec{h}_{k+1}$ は、初項 $- \frac{1}{n} \left( 1 - \frac{1}{n} \right)$、公比 $1 - \frac{1}{n}$、項数 $n$ の等比数列の和である。
$n \ge 2$ より公比 $1 - \frac{1}{n} \neq 1$ であるから、
$$\begin{aligned} S_n &= \sum_{k=1}^n \left\{ - \frac{1}{n} \left( 1 - \frac{1}{n} \right)^k \right\} \\ &= - \frac{1}{n} \cdot \frac{\left( 1 - \frac{1}{n} \right) \left\{ 1 - \left( 1 - \frac{1}{n} \right)^n \right\}}{1 - \left( 1 - \frac{1}{n} \right)} \\ &= - \frac{1}{n} \cdot \frac{\left( 1 - \frac{1}{n} \right) \left\{ 1 - \left( 1 - \frac{1}{n} \right)^n \right\}}{\frac{1}{n}} \\ &= - \left( 1 - \frac{1}{n} \right) \left\{ 1 - \left( 1 - \frac{1}{n} \right)^n \right\} \end{aligned}$$
ここで、$n \to \infty$ のときの極限を考える。
$$\lim_{n\to\infty} \left( 1 - \frac{1}{n} \right) = 1$$
また、$\left( 1 - \frac{1}{n} \right)^n$ について、
$$\left( 1 - \frac{1}{n} \right)^n = \left( \frac{n-1}{n} \right)^n = \frac{1}{\left( \frac{n}{n-1} \right)^n} = \frac{1}{\left( 1 + \frac{1}{n-1} \right)^n} = \frac{1}{\left( 1 + \frac{1}{n-1} \right)^{n-1} \cdot \left( 1 + \frac{1}{n-1} \right)}$$
$n \to \infty$ のとき、$n-1 \to \infty$ であり、問題文の条件より $\lim_{n\to\infty} \left( 1 + \frac{1}{n-1} \right)^{n-1} = e$ であるから、
$$\lim_{n\to\infty} \left( 1 - \frac{1}{n} \right)^n = \frac{1}{e \cdot 1} = \frac{1}{e}$$
したがって、求める極限値は
$$\begin{aligned} \lim_{n\to\infty} S_n &= - 1 \cdot \left( 1 - \frac{1}{e} \right) \\ &= \frac{1}{e} - 1 \end{aligned}$$
解説
図形的に次々と垂線を下ろす操作は、ベクトルを用いると規則的な等比数列の形に帰着できる。このとき、それぞれの線分が乗っている直線を基準に単位ベクトルを設定すると、角度の処理が容易になり計算ミスを防ぐことができる。 極限計算において、$(1 - 1/n)^n \to 1/e$ は典型的な変形である。$1 - 1/n$ の逆数をとり、定義式 $(1 + 1/x)^x \to e$ の形を作り出すのが定石である。
答え
(1) $\displaystyle - \frac{1}{n} \left( 1 - \frac{1}{n} \right)^k$
(2) $\displaystyle \frac{1}{e} - 1$
この基礎から進む入試問題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。