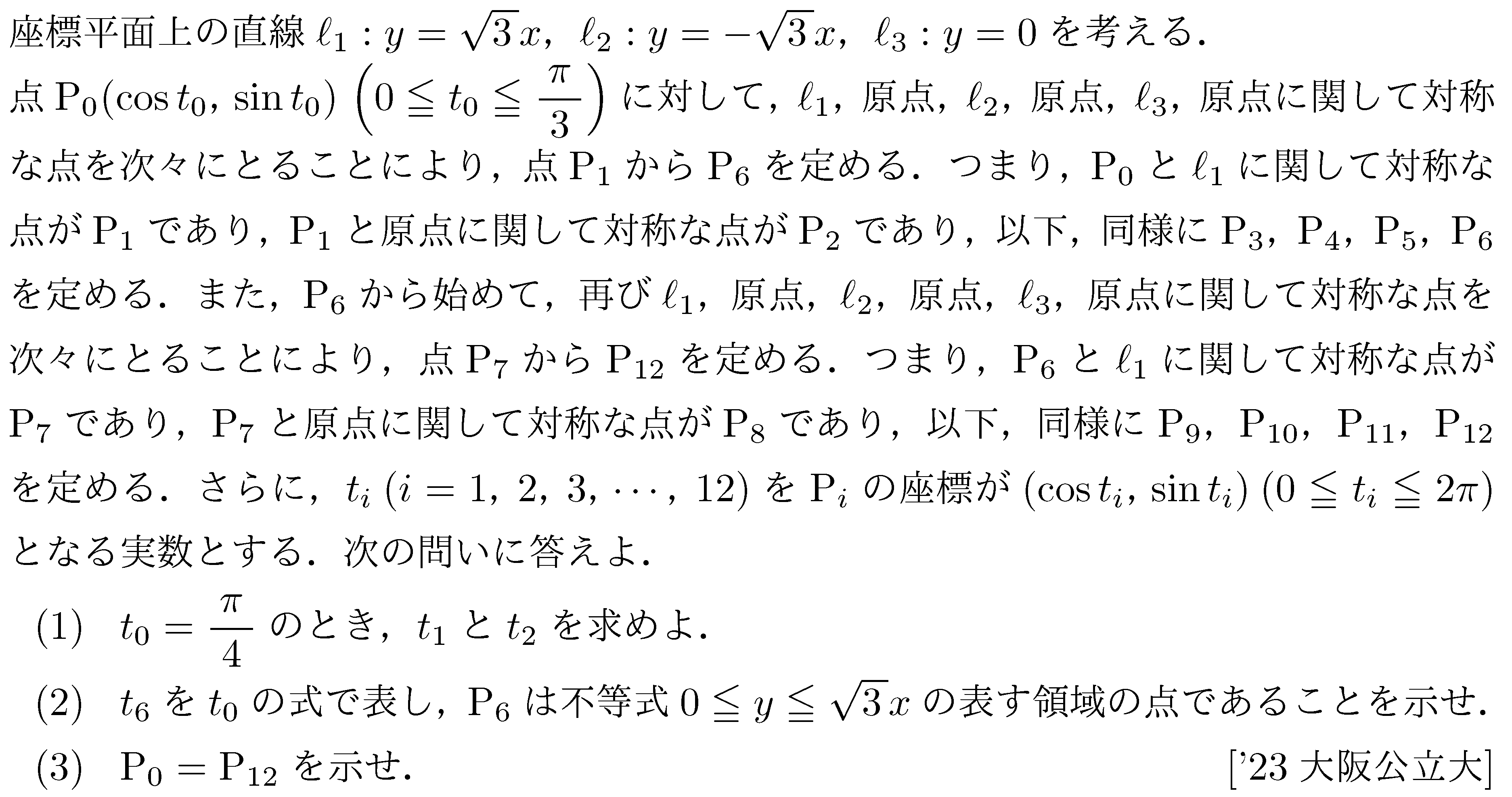
数学2 三角関数 問題 116 解説
方針・初手
点 $\text{P}_k$ はすべて原点中心、半径 1 の単位円周上にあるため、各点の座標は偏角 $t_k$ だけで決まる。 直線に関する対称移動と、原点に関する対称移動(180度回転)を繰り返す操作であるから、偏角 $t_k$ の漸化的な関係を追っていく方針が最も自然である。
一般に、原点を通り $x$ 軸の正の向きとなす角(偏角)が $\alpha$ である直線に関する対称移動では、偏角 $\theta$ の点は偏角 $2\alpha - \theta$ の点に移る。また、原点に関する対称移動では、偏角 $\theta$ の点は偏角 $\theta + \pi$ の点に移る。 これらの性質を用いて、各ステップの偏角を求めていく。
なお、複素数平面を用い、対称移動を複素数の共役と積で表現する方法も非常に見通しが良い。ここでは偏角を直接計算する解法と、複素数平面を用いる解法の2つを示す。
解法1
問題で与えられた直線が $x$ 軸の正の向きとなす角をそれぞれ確認する。 $\ell_1 : y = \sqrt{3}x$ は偏角 $\frac{\pi}{3}$ の直線である。 $\ell_2 : y = -\sqrt{3}x$ は偏角 $\frac{2\pi}{3}$ の直線である。 $\ell_3 : y = 0$ は偏角 $0$ の直線($x$ 軸)である。
各点 $\text{P}_k$ の偏角を $t_k$ とする。以下の計算において、偏角の合同式はすべて法を $2\pi$ とし、$\equiv$ で表す。
(1)
$t_0 = \frac{\pi}{4}$ とする。 点 $\text{P}_1$ は、点 $\text{P}_0$ を直線 $\ell_1$ について対称移動した点であるから、その偏角 $t_1$ は
$$t_1 \equiv 2 \cdot \frac{\pi}{3} - t_0 = \frac{2\pi}{3} - \frac{\pi}{4} = \frac{5\pi}{12} \pmod{2\pi}$$
$0 \leqq t_1 \leqq 2\pi$ を満たすので、$t_1 = \frac{5\pi}{12}$ である。
点 $\text{P}_2$ は、点 $\text{P}_1$ を原点について対称移動した点であるから、その偏角 $t_2$ は
$$t_2 \equiv t_1 + \pi = \frac{5\pi}{12} + \pi = \frac{17\pi}{12} \pmod{2\pi}$$
$0 \leqq t_2 \leqq 2\pi$ を満たすので、$t_2 = \frac{17\pi}{12}$ である。
(2)
一般の $t_0 \left(0 \leqq t_0 \leqq \frac{\pi}{3}\right)$ に対して、順に偏角の推移を計算する。
$$\begin{aligned} t_1 &\equiv 2 \cdot \frac{\pi}{3} - t_0 = \frac{2\pi}{3} - t_0 \\ t_2 &\equiv t_1 + \pi = \frac{5\pi}{3} - t_0 \\ t_3 &\equiv 2 \cdot \frac{2\pi}{3} - t_2 = \frac{4\pi}{3} - \left(\frac{5\pi}{3} - t_0\right) = -\frac{\pi}{3} + t_0 \\ t_4 &\equiv t_3 + \pi = \frac{2\pi}{3} + t_0 \\ t_5 &\equiv 2 \cdot 0 - t_4 = -t_4 = -\frac{2\pi}{3} - t_0 \\ t_6 &\equiv t_5 + \pi = \frac{\pi}{3} - t_0 \pmod{2\pi} \end{aligned}$$
ここで、条件 $0 \leqq t_0 \leqq \frac{\pi}{3}$ より、
$$0 \leqq \frac{\pi}{3} - t_0 \leqq \frac{\pi}{3}$$
が成り立つ。$t_6$ は $0 \leqq t_6 \leqq 2\pi$ を満たす実数として定義されているため、
$$t_6 = \frac{\pi}{3} - t_0$$
と一意に定まる。
次に、点 $\text{P}_6$ の座標を $(x, y) = (\cos t_6, \sin t_6)$ とおく。 上記より $0 \leqq t_6 \leqq \frac{\pi}{3}$ であるから、
$$\cos t_6 \geqq \frac{1}{2} > 0, \quad \sin t_6 \geqq 0$$
よって、$x > 0$ かつ $y \geqq 0$ である。 さらに、$\tan t_6 = \frac{\sin t_6}{\cos t_6} = \frac{y}{x}$ であり、$0 \leqq t_6 \leqq \frac{\pi}{3}$ において関数 $\tan \theta$ は単調増加であるから、
$$\frac{y}{x} = \tan t_6 \leqq \tan \frac{\pi}{3} = \sqrt{3}$$
$x > 0$ より両辺に $x$ を掛けて、
$$y \leqq \sqrt{3}x$$
以上より、$0 \leqq y$ と $y \leqq \sqrt{3}x$ が同時に成り立つため、点 $\text{P}_6$ は不等式 $0 \leqq y \leqq \sqrt{3}x$ の表す領域の点である。
(3)
点 $\text{P}_6$ から $\text{P}_{12}$ を定める操作手順は、点 $\text{P}_0$ から $\text{P}_6$ を定めた操作手順と全く同じである。 (2) の結果から、$\text{P}_6$ の偏角 $t_6$ は $0 \leqq t_6 \leqq \frac{\pi}{3}$ を満たしている。これは $\text{P}_0$ の偏角 $t_0$ が満たす初期条件と同じである。 したがって、(2) の議論において $t_0$ を $t_6$ に、$t_6$ を $t_{12}$ に置き換えた漸化式がそのまま成立し、
$$t_{12} \equiv \frac{\pi}{3} - t_6 \pmod{2\pi}$$
となる。これに $t_6 = \frac{\pi}{3} - t_0$ を代入すると、
$$t_{12} \equiv \frac{\pi}{3} - \left(\frac{\pi}{3} - t_0\right) = t_0 \pmod{2\pi}$$
点 $\text{P}_0$ と点 $\text{P}_{12}$ はともに原点中心の単位円周上にあり、その偏角の差が $2\pi$ の整数倍であるから、座標として同一の点である。 したがって、$\text{P}_0 = \text{P}_{12}$ が成り立つ。
解法2
複素数平面を用いて解く。点 $\text{P}_k$ に対応する複素数を $z_k$ とおくと、$z_k = \cos t_k + i\sin t_k = e^{it_k}$ である。
一般に、原点を通り実軸となす角が $\alpha$ である直線に関する点 $z$ の対称点 $z'$ は、$z' = e^{2i\alpha} \overline{z}$ と表される。また、原点に関する対称点は $-z$ である。 $\ell_1, \ell_2, \ell_3$ が実軸となす角はそれぞれ $\frac{\pi}{3}, \frac{2\pi}{3}, 0$ であるから、順次 $z_k$ を求めると以下のようになる。
$$\begin{aligned} z_1 &= e^{i\frac{2\pi}{3}} \overline{z_0} \\ z_2 &= -z_1 = -e^{i\frac{2\pi}{3}} \overline{z_0} \\ z_3 &= e^{i\frac{4\pi}{3}} \overline{z_2} = e^{i\frac{4\pi}{3}} \overline{\left( -e^{i\frac{2\pi}{3}} \overline{z_0} \right)} = e^{i\frac{4\pi}{3}} \left( -e^{-i\frac{2\pi}{3}} z_0 \right) = -e^{i\frac{2\pi}{3}} z_0 \\ z_4 &= -z_3 = e^{i\frac{2\pi}{3}} z_0 \\ z_5 &= e^{i \cdot 0} \overline{z_4} = \overline{ \left( e^{i\frac{2\pi}{3}} z_0 \right) } = e^{-i\frac{2\pi}{3}} \overline{z_0} \\ z_6 &= -z_5 = -e^{-i\frac{2\pi}{3}} \overline{z_0} = e^{i\pi} e^{-i\frac{2\pi}{3}} \overline{z_0} = e^{i\frac{\pi}{3}} \overline{z_0} \end{aligned}$$
(1)
$t_0 = \frac{\pi}{4}$ のとき、$z_0 = e^{i\frac{\pi}{4}}$ であるから、
$$z_1 = e^{i\frac{2\pi}{3}} \overline{ e^{i\frac{\pi}{4}} } = e^{i\frac{2\pi}{3}} e^{-i\frac{\pi}{4}} = e^{i\frac{5\pi}{12}}$$
$$z_2 = -z_1 = e^{i\pi} e^{i\frac{5\pi}{12}} = e^{i\frac{17\pi}{12}}$$
$z_k = e^{it_k}$ かつ $0 \leqq t_k \leqq 2\pi$ より、$t_1 = \frac{5\pi}{12}, \ t_2 = \frac{17\pi}{12}$ である。
(2)
$z_0 = e^{it_0}$ を $z_6$ の式に代入すると、
$$z_6 = e^{i\frac{\pi}{3}} \overline{ e^{it_0} } = e^{i\frac{\pi}{3}} e^{-it_0} = e^{i\left(\frac{\pi}{3} - t_0\right)}$$
したがって、$t_6 \equiv \frac{\pi}{3} - t_0 \pmod{2\pi}$ となる。 $0 \leqq t_0 \leqq \frac{\pi}{3}$ より $0 \leqq \frac{\pi}{3} - t_0 \leqq \frac{\pi}{3}$ であるから、$t_6 = \frac{\pi}{3} - t_0$ である。 点 $\text{P}_6$ が領域 $0 \leqq y \leqq \sqrt{3}x$ に属することの証明は、解法1と同様であるため省略する。
(3)
$\text{P}_6$ から $\text{P}_{12}$ への変換は、$\text{P}_0$ から $\text{P}_6$ への変換と同一の合成変換である。 したがって、$z_6$ と $z_0$ の関係式 $z_6 = e^{i\frac{\pi}{3}} \overline{z_0}$ において、$z_0$ を $z_6$ に、$z_6$ を $z_{12}$ に置き換えた式が成り立つ。
$$z_{12} = e^{i\frac{\pi}{3}} \overline{z_6}$$
これに $z_6 = e^{i\frac{\pi}{3}} \overline{z_0}$ を代入すると、
$$z_{12} = e^{i\frac{\pi}{3}} \overline{ \left( e^{i\frac{\pi}{3}} \overline{z_0} \right) } = e^{i\frac{\pi}{3}} e^{-i\frac{\pi}{3}} z_0 = e^0 z_0 = z_0$$
$z_{12} = z_0$ であるから、複素数平面上の点として $\text{P}_{12}$ と $\text{P}_0$ は一致する。すなわち $\text{P}_0 = \text{P}_{12}$ が示された。
解説
平面上の合同変換(等長変換)の合成に関する問題である。 直線に関する対称移動などの「折り返し(鏡映)」を奇数回合成すると、必ずある直線に関する対称移動になる。一方で、偶数回合成すると「回転移動」または「平行移動」になる。 本問の1回のステップは「直線に関する対称移動」と「原点に関する対称移動(原点を中心とする180度回転)」の2つの変換の合成であり、全体では偶数回の鏡映が含まれるため、結果的にある角の「回転移動」として表される。 複素数平面を用いる解法2では、これが $z_6 = e^{i\frac{\pi}{3}} \overline{z_0}$ という「折り返し」として美しく1本の式に集約されており、代数的な処理が非常に簡潔になるためおすすめである。
答え
(1) $t_1 = \frac{5\pi}{12}, \ t_2 = \frac{17\pi}{12}$
(2) $t_6 = \frac{\pi}{3} - t_0$, 領域の証明は略解(本文参照)
(3) 略解(本文参照)
この基礎から進む入試問題
自分の記録
誤りを報告
問題文の写しミス、解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。