京都大学 1996年 文系 第1問 解説
方針・初手
ベクトルの大きさや内積の基本的な性質を用いて計算を進める。 (1) は $|\overrightarrow{OY}|^2$ をベクトルの内積の性質を用いて展開し、計算する。 (2) は与えられた等式を整理し、ベクトルの平行条件や大きさに着目する。 (3) は成分表示(座標)を導入し、三角関数の加法定理や倍角の公式を用いて点 $Y$ の軌跡をパラメータ表示する。計算を簡単にするため、定点 $A$ を $x$ 軸上に設定するとよい。
解法1
(1)
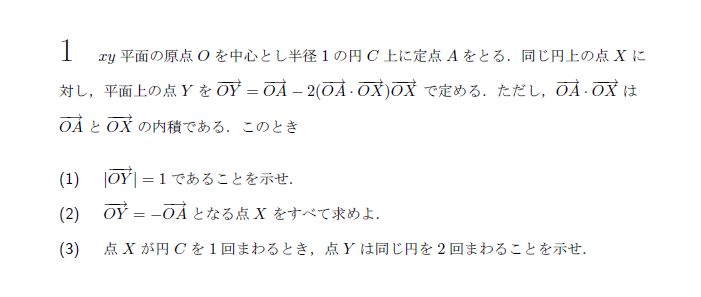
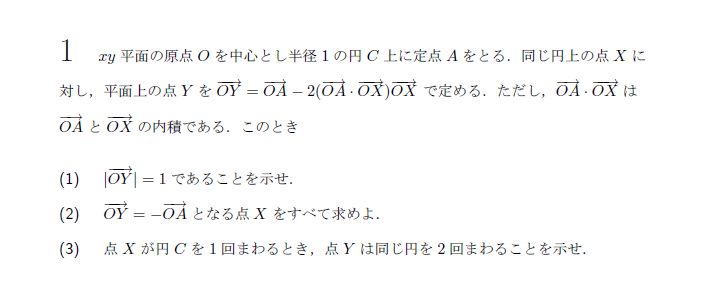
点 $A, X$ は原点 $O$ を中心とする半径 $1$ の円 $C$ 上にあるから
$$ |\overrightarrow{OA}| = 1, \quad |\overrightarrow{OX}| = 1 $$
である。与えられた式 $\overrightarrow{OY} = \overrightarrow{OA} - 2(\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX}$ より、$|\overrightarrow{OY}|^2$ を計算すると
$$\begin{aligned} |\overrightarrow{OY}|^2 &= |\overrightarrow{OA} - 2(\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX}|^2 \\ &= |\overrightarrow{OA}|^2 - 4(\overrightarrow{OA} \cdot \overrightarrow{OX})(\overrightarrow{OA} \cdot \overrightarrow{OX}) + 4(\overrightarrow{OA} \cdot \overrightarrow{OX})^2 |\overrightarrow{OX}|^2 \\ &= |\overrightarrow{OA}|^2 - 4(\overrightarrow{OA} \cdot \overrightarrow{OX})^2 + 4(\overrightarrow{OA} \cdot \overrightarrow{OX})^2 |\overrightarrow{OX}|^2 \end{aligned}$$
ここで、$|\overrightarrow{OA}| = 1, |\overrightarrow{OX}| = 1$ を代入すると
$$\begin{aligned} |\overrightarrow{OY}|^2 &= 1^2 - 4(\overrightarrow{OA} \cdot \overrightarrow{OX})^2 + 4(\overrightarrow{OA} \cdot \overrightarrow{OX})^2 \times 1^2 \\ &= 1 \end{aligned}$$
$|\overrightarrow{OY}| \geqq 0$ であるから、$|\overrightarrow{OY}| = 1$ である。(証明終)
(2)
$\overrightarrow{OY} = -\overrightarrow{OA}$ のとき、与式より
$$ \overrightarrow{OA} - 2(\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX} = -\overrightarrow{OA} $$
整理すると
$$ 2\overrightarrow{OA} = 2(\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX} $$
$$ \overrightarrow{OA} = (\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX} $$
両辺のベクトルの大きさを考えると
$$ |\overrightarrow{OA}| = |(\overrightarrow{OA} \cdot \overrightarrow{OX})\overrightarrow{OX}| $$
$$ |\overrightarrow{OA}| = |\overrightarrow{OA} \cdot \overrightarrow{OX}| |\overrightarrow{OX}| $$
$|\overrightarrow{OA}| = 1, |\overrightarrow{OX}| = 1$ より
$$ 1 = |\overrightarrow{OA} \cdot \overrightarrow{OX}| \times 1 $$
よって
$$ \overrightarrow{OA} \cdot \overrightarrow{OX} = \pm 1 $$
となる。
(i)
$\overrightarrow{OA} \cdot \overrightarrow{OX} = 1$ のとき
$\overrightarrow{OA} = 1 \times \overrightarrow{OX}$ より $\overrightarrow{OX} = \overrightarrow{OA}$ となる。 すなわち、点 $X$ は点 $A$ と一致する。
(ii)
$\overrightarrow{OA} \cdot \overrightarrow{OX} = -1$ のとき
$\overrightarrow{OA} = -1 \times \overrightarrow{OX}$ より $\overrightarrow{OX} = -\overrightarrow{OA}$ となる。 すなわち、点 $X$ は原点 $O$ に関して点 $A$ と対称な点である。
逆に、これらを満たす点 $X$ については $\overrightarrow{OY} = -\overrightarrow{OA}$ が成り立つ。 したがって、求める点 $X$ は、点 $A$ および原点 $O$ に関して点 $A$ と対称な点である。
(3)
定点 $A$ が $x$ 軸の正の向きにあるように座標軸を設定しても一般性を失わない。 このとき、$\overrightarrow{OA} = (1, 0)$ と表せる。 また、点 $X$ は単位円上の点であるから、偏角を $\theta$ として $\overrightarrow{OX} = (\cos\theta, \sin\theta)$ と表せる。 このとき、内積は
$$ \overrightarrow{OA} \cdot \overrightarrow{OX} = 1 \times \cos\theta + 0 \times \sin\theta = \cos\theta $$
となる。これを与式に代入して $\overrightarrow{OY}$ の成分を計算すると
$$\begin{aligned} \overrightarrow{OY} &= (1, 0) - 2\cos\theta (\cos\theta, \sin\theta) \\ &= (1 - 2\cos^2\theta, -2\sin\theta\cos\theta) \end{aligned}$$
三角関数の倍角の公式を用いると
$$\begin{aligned} \overrightarrow{OY} &= (-\cos 2\theta, -\sin 2\theta) \\ &= (\cos(2\theta + \pi), \sin(2\theta + \pi)) \end{aligned}$$
となる。
点 $X$ が円 $C$ を1回まわるとき、$\theta$ は $0$ から $2\pi$ まで連続的に変化する。 このとき、$2\theta + \pi$ は $\pi$ から $5\pi$ まで連続的に変化する。 変化量は $5\pi - \pi = 4\pi$ であり、これは円周 $2$ 周分に相当する。 また、(1) より常に点 $Y$ は円 $C$ 上にある。 したがって、点 $Y$ は円 $C$ を2回まわる。(証明終)
解法2
(3)
複素数平面を用いて証明する。 原点を中心とする単位円上の点 $A, X, Y$ をそれぞれ複素数 $\alpha, z, w$ で表す。 条件より $|\alpha| = 1, |z| = 1$ である。 ベクトル $\overrightarrow{OA}, \overrightarrow{OX}$ の内積 $\overrightarrow{OA} \cdot \overrightarrow{OX}$ は、複素数を用いると $\frac{\alpha \bar{z} + \bar{\alpha} z}{2}$ と表せる。 $\overrightarrow{OY}$ の定義式を複素数で書き直すと
$$ w = \alpha - 2 \left( \frac{\alpha \bar{z} + \bar{\alpha} z}{2} \right) z $$
となる。これを整理すると
$$\begin{aligned} w &= \alpha - (\alpha \bar{z} + \bar{\alpha} z) z \\ &= \alpha - \alpha \bar{z} z - \bar{\alpha} z^2 \end{aligned}$$
ここで $z$ は単位円上の点であるから $|z|^2 = z \bar{z} = 1$ である。 これを代入すると
$$\begin{aligned} w &= \alpha - \alpha \times 1 - \bar{\alpha} z^2 \\ &= -\bar{\alpha} z^2 \end{aligned}$$
となる。
定点 $\alpha$ の偏角を $\phi$ とし、$\alpha = \cos\phi + i\sin\phi$ とおく。 動点 $z$ の偏角を $\theta$ とし、$z = \cos\theta + i\sin\theta$ とおく。 ド・モアブルの定理より
$$ z^2 = \cos 2\theta + i\sin 2\theta $$
また
$$ -\bar{\alpha} = -(\cos\phi - i\sin\phi) = \cos(\pi - \phi) + i\sin(\pi - \phi) $$
であるから、これらを掛け合わせると
$$ w = \cos(2\theta + \pi - \phi) + i\sin(2\theta + \pi - \phi) $$
となる。
点 $X(z)$ が円 $C$ を1回まわるとき、$\theta$ は連続的に $2\pi$ だけ増加する。 このとき、点 $Y(w)$ の偏角 $2\theta + \pi - \phi$ は連続的に $4\pi$ 増加する。 偏角が $4\pi$ 変化し、かつ $|w| = 1$ であるから、点 $Y$ は同じ円を2回まわる。(証明終)
解説
ベクトルの定義式を図形的に解釈するか、成分(または複素数)に翻訳して処理するかの選択が問われる問題です。 (1)(2)はベクトルの演算規則に従って素直に展開・比較を行えば解決します。 (3)は「点をまわる」という動的な条件を扱うため、角度(偏角)を変数として設定するのが定石です。座標軸を工夫して定点 $A$ を扱いやすい座標に設定する(解法1)か、図形の回転と相性が良い複素数平面を利用する(解法2)と、計算が見やすく論理展開もすっきりとまとまります。
答え
(1)
略(解法1の証明を参照)
(2)
点 $A$、および原点 $O$ に関して点 $A$ と対称な点
(3)
略(解法1の証明を参照)
この問題の前に見る基礎問題
/04072302.png)
/04072303.png)
/04102118.png)
/05031501.png)
/14041201.png)
/16091801.png)
類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。