東京大学 2009年 理系 第6問 解説
方針・初手
- (1)は各点の位置をベクトルで表し、距離の条件を時刻 $t$ に関する2次不等式に帰着させて、それが $t \geqq 0$ に実数解をもつ条件から絞り込む。
- (2)はベクトルの差 $\overrightarrow{e_1} - \overrightarrow{e_2}$ を考える際、複素数平面を利用して偏角を求めると処理しやすい。
- (3)は(2)で得られた関係式を3組足し引きすることで各角度 $\theta_n$ の範囲を求め、$T$ における点と重心の距離を幾何的に評価する。
解法1
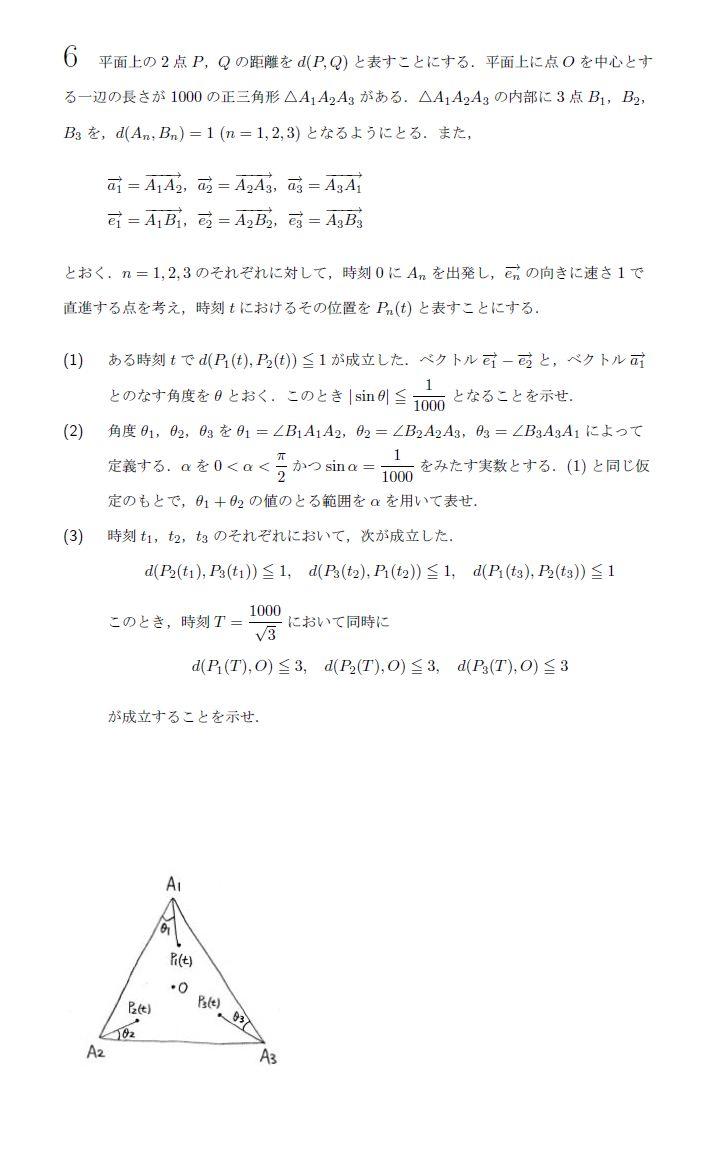
(1)
時刻 $t$ における点 $P_1(t), P_2(t)$ の位置ベクトルはそれぞれ $\overrightarrow{P_1(t)} = \overrightarrow{A_1} + t\overrightarrow{e_1}, \overrightarrow{P_2(t)} = \overrightarrow{A_2} + t\overrightarrow{e_2}$ と表せる。 $d(P_1(t), P_2(t)) \leqq 1$ より、
$$ |\overrightarrow{A_2} - \overrightarrow{A_1} + t(\overrightarrow{e_2} - \overrightarrow{e_1})| \leqq 1 $$
$\overrightarrow{a_1} = \overrightarrow{A_1 A_2} = \overrightarrow{A_2} - \overrightarrow{A_1}$、$\vec{v} = \overrightarrow{e_1} - \overrightarrow{e_2}$ とおくと、
$$ |\overrightarrow{a_1} - t\vec{v}| \leqq 1 $$
両辺を2乗して整理すると、
$$ |\vec{v}|^2 t^2 - 2(\overrightarrow{a_1} \cdot \vec{v})t + |\overrightarrow{a_1}|^2 - 1 \leqq 0 $$
これが $t \geqq 0$ で実数解をもつ条件を考える。 $|\overrightarrow{a_1}| = 1000$ であり、仮に $\vec{v} = \vec{0}$ とすると $1000^2 - 1 \leqq 0$ となり矛盾するため、$\vec{v} \neq \vec{0}$ である。 $f(t) = |\vec{v}|^2 t^2 - 2(\overrightarrow{a_1} \cdot \vec{v})t + 1000^2 - 1$ とおく。 $f(0) = 1000^2 - 1 > 0$ であるから、$f(t) \leqq 0$ となる $t \geqq 0$ が存在するための必要十分条件は、放物線 $y=f(t)$ の軸が正領域にあり、かつ $f(t)=0$ の判別式 $D \geqq 0$ となることである。
軸について、$\frac{\overrightarrow{a_1} \cdot \vec{v}}{|\vec{v}|^2} > 0$ より $\overrightarrow{a_1} \cdot \vec{v} > 0$。 $\overrightarrow{a_1}$ と $\vec{v}$ のなす角が $\theta$ なので、$\overrightarrow{a_1} \cdot \vec{v} = 1000|\vec{v}|\cos\theta > 0 \implies \cos\theta > 0$ が得られる。
判別式について、
$$ \frac{D}{4} = (\overrightarrow{a_1} \cdot \vec{v})^2 - |\vec{v}|^2 (1000^2 - 1) \geqq 0 $$
$$ (1000|\vec{v}|\cos\theta)^2 - |\vec{v}|^2(1000^2 - 1) \geqq 0 $$
$|\vec{v}|^2 > 0$ で割って整理すると、
$$ 1000^2 \cos^2\theta - 1000^2 + 1 \geqq 0 $$
$$ 1000^2(1 - \sin^2\theta) - 1000^2 + 1 \geqq 0 $$
$$ 1 - 1000^2 \sin^2\theta \geqq 0 \implies \sin^2\theta \leqq \frac{1}{1000^2} $$
よって、$|\sin\theta| \leqq \frac{1}{1000}$ が成立する。(証明終)
(2)
$A_1$ を原点とし、$\overrightarrow{a_1}$ の向きを実軸($x$軸)の正の向きとする複素数平面を考える。 $\triangle A_1 A_2 A_3$ は正三角形であるから、内部が正領域にあるとすれば $\overrightarrow{a_1}, \overrightarrow{a_2}, \overrightarrow{a_3}$ の偏角はそれぞれ $0, \frac{2\pi}{3}, \frac{4\pi}{3}$ となる。
$B_1, B_2$ は三角形の内部の点であり、$d(A_1, B_1)=1, d(A_2, B_2)=1$ より $\overrightarrow{e_1}, \overrightarrow{e_2}$ を表す複素数の絶対値は $1$ である。また、定義より $\overrightarrow{e_1}$ の偏角は $\theta_1$($0 < \theta_1 < \frac{\pi}{3}$)、$\overrightarrow{e_2}$ の偏角は $\frac{2\pi}{3} + \theta_2$($0 < \theta_2 < \frac{\pi}{3}$)となる。 $\vec{v} = \overrightarrow{e_1} - \overrightarrow{e_2}$ を複素数 $v$ で表すと、
$$ v = (\cos\theta_1 + i\sin\theta_1) - \left\{\cos\left(\frac{2\pi}{3}+\theta_2\right) + i\sin\left(\frac{2\pi}{3}+\theta_2\right)\right\} $$
和を積に直す公式を用いると、
$$ \begin{aligned} v &= -2\sin\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} \sin\frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2} + i \left( 2\cos\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} \sin\frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2} \right) \\ &= \left(-2\sin\frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2}\right) \left\{ \sin\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} - i\cos\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} \right\} \\ &= \left(-2\sin\frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2}\right) \left\{ \cos\left(\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} - \frac{\pi}{2}\right) + i\sin\left(\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} - \frac{\pi}{2}\right) \right\} \end{aligned} $$
ここで、$0 < \theta_1 < \frac{\pi}{3}$、$0 < \theta_2 < \frac{\pi}{3}$ より $-\frac{\pi}{3} < \theta_1 - \theta_2 < \frac{\pi}{3}$ であり、$-\frac{\pi}{2} < \frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2} < -\frac{\pi}{6}$ となるので、$-2\sin\frac{\theta_1 - \theta_2 - \frac{2\pi}{3}}{2} > 0$ である。 したがって、$v$ の偏角は $\frac{\theta_1 + \theta_2 + \frac{2\pi}{3}}{2} - \frac{\pi}{2} = \frac{\theta_1 + \theta_2 - \frac{\pi}{3}}{2}$ となる。
$\vec{v}$ と $\overrightarrow{a_1}$ のなす角を $\theta$($0 \leqq \theta \leqq \pi$)とすると、$\theta = \left|\frac{\theta_1 + \theta_2 - \frac{\pi}{3}}{2}\right|$ である。 (1)より $\cos\theta > 0$ かつ $\sin\theta \leqq \sin\alpha$ であり、$0 < \alpha < \frac{\pi}{2}$ だから $\theta \leqq \alpha$ である。
$$ \left|\frac{\theta_1 + \theta_2 - \frac{\pi}{3}}{2}\right| \leqq \alpha $$
$$ -2\alpha \leqq \theta_1 + \theta_2 - \frac{\pi}{3} \leqq 2\alpha $$
$$ \frac{\pi}{3} - 2\alpha \leqq \theta_1 + \theta_2 \leqq \frac{\pi}{3} + 2\alpha $$
(3)
(2)と同様にして、$d(P_2(t_1), P_3(t_1)) \leqq 1$ および $d(P_3(t_2), P_1(t_2)) \leqq 1$ から、
$$ \frac{\pi}{3} - 2\alpha \leqq \theta_2 + \theta_3 \leqq \frac{\pi}{3} + 2\alpha $$
$$ \frac{\pi}{3} - 2\alpha \leqq \theta_3 + \theta_1 \leqq \frac{\pi}{3} + 2\alpha $$
が得られる。これら3つの不等式を $S_1 = \theta_1 + \theta_2 - \frac{\pi}{3}$、$S_2 = \theta_2 + \theta_3 - \frac{\pi}{3}$、$S_3 = \theta_3 + \theta_1 - \frac{\pi}{3}$ とおくと、$|S_k| \leqq 2\alpha$ ($k=1,2,3$) である。 $2\theta_1 - \frac{\pi}{3} = S_1 + S_3 - S_2$ であるから、
$$ \left| 2\theta_1 - \frac{\pi}{3} \right| \leqq |S_1| + |S_3| + |S_2| \leqq 6\alpha $$
よって $\left| \theta_1 - \frac{\pi}{6} \right| \leqq 3\alpha$ が成り立つ。対称性から $\left| \theta_2 - \frac{\pi}{6} \right| \leqq 3\alpha$、$\left| \theta_3 - \frac{\pi}{6} \right| \leqq 3\alpha$ も同様に成り立つ。
次に、$T = \frac{1000}{\sqrt{3}}$ のときの $P_1(T)$ と $O$ の距離を求める。 $A_1$ を原点、$\overrightarrow{a_1}$ 方向を $x$ 軸正の向きとすると、重心 $O$ の位置ベクトルは $\overrightarrow{A_1 O} = \left(T\cos\frac{\pi}{6}, T\sin\frac{\pi}{6}\right)$、また $\overrightarrow{A_1 P_1(T)} = T\overrightarrow{e_1} = (T\cos\theta_1, T\sin\theta_1)$ である。
$$ \begin{aligned} d(P_1(T), O)^2 &= |\overrightarrow{A_1 P_1(T)} - \overrightarrow{A_1 O}|^2 \\ &= T^2 \left(\cos\theta_1 - \cos\frac{\pi}{6}\right)^2 + T^2 \left(\sin\theta_1 - \sin\frac{\pi}{6}\right)^2 \\ &= 2T^2 - 2T^2 \cos\left(\theta_1 - \frac{\pi}{6}\right) \\ &= 4T^2 \sin^2\frac{\theta_1 - \frac{\pi}{6}}{2} \end{aligned} $$
よって $d(P_1(T), O) = 2T \left|\sin\frac{\theta_1 - \frac{\pi}{6}}{2}\right|$ となる。 関数 $g(x) = \frac{\sin x}{x}$ は $0 < x < \pi$ で単調減少である。 $0 \leqq \left|\frac{\theta_1 - \frac{\pi}{6}}{2}\right| \leqq \frac{3\alpha}{2} < \pi$ であるから、$\left|\sin\frac{\theta_1 - \frac{\pi}{6}}{2}\right| \leqq \sin\frac{3\alpha}{2}$。
さらに、$g\left(\frac{3}{2}\alpha\right) < g(\alpha)$ より $\frac{\sin(3\alpha/2)}{3\alpha/2} < \frac{\sin\alpha}{\alpha}$、すなわち $\sin\frac{3\alpha}{2} < \frac{3}{2}\sin\alpha$ が成り立つ。 したがって、
$$ d(P_1(T), O) \leqq 2T \sin\frac{3\alpha}{2} < 2T \cdot \frac{3}{2}\sin\alpha = 3T\sin\alpha $$
$T = \frac{1000}{\sqrt{3}}$、$\sin\alpha = \frac{1}{1000}$ を代入すると、
$$ 3T\sin\alpha = 3 \cdot \frac{1000}{\sqrt{3}} \cdot \frac{1}{1000} = \sqrt{3} < 3 $$
ゆえに $d(P_1(T), O) \leqq 3$ が成立する。同様の議論により、$d(P_2(T), O) \leqq 3$ および $d(P_3(T), O) \leqq 3$ も成立する。(証明終)
解説
(1)は点の軌跡をベクトル方程式で表現し、距離の2乗が2次関数になることを利用する典型的な処理である。 (2)はベクトルの差の偏角を求める問題であり、複素数平面を利用して和積の公式を用いると、簡明な式変形でなす角を評価できる。 (3)は(2)の結果を巡回的に用いて角度のズレの範囲を絞り込み、幾何学的な距離の評価に帰着させる総合的な問題である。$\frac{\sin x}{x}$ の単調性を利用した不等式評価がポイントとなる。
答え
(1)
$$ |\sin\theta| \leqq \frac{1}{1000} $$
(2)
$$ \frac{\pi}{3} - 2\alpha \leqq \theta_1 + \theta_2 \leqq \frac{\pi}{3} + 2\alpha $$
(3)
$$ T = \frac{1000}{\sqrt{3}} $$
とすれば、
$$ d(P_1(T), O) \leqq 3,\quad d(P_2(T), O) \leqq 3,\quad d(P_3(T), O) \leqq 3 $$
この問題の前に見る基礎問題



類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。