大阪大学 1995年 理系 第1問 解説
方針・初手
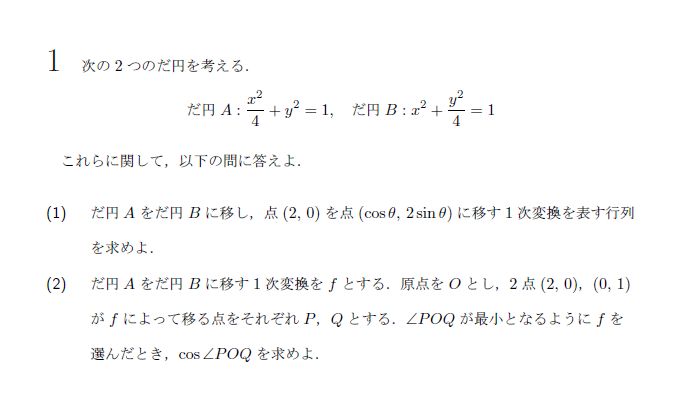
だ円を別のだ円に移す1次変換についての問題である。 (1) は、1次変換を表す行列を $M = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$ とおき、与えられた点の移動条件と、だ円上の任意の点が移動先のだ円上に乗る条件から各成分を求めるのが基本方針である。また、だ円を単位円に変換する行列を挟むことで、直交行列の性質を利用する鮮やかな解法もある。 (2) は、(1) で求めた行列を用いて2点 $P, Q$ の座標をパラメータで表し、内積を用いて $\cos\angle POQ$ を立式して最大値を求める。
解法1
(1)
求める1次変換を表す行列を $M = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$ とする。 点 $(2, 0)$ を点 $(\cos\theta, 2\sin\theta)$ に移すので、
$$ \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} 2 \\ 0 \end{pmatrix} = \begin{pmatrix} \cos\theta \\ 2\sin\theta \end{pmatrix} $$
$$ \begin{pmatrix} 2a \\ 2c \end{pmatrix} = \begin{pmatrix} \cos\theta \\ 2\sin\theta \end{pmatrix} $$
これより、$a = \frac{1}{2}\cos\theta, c = \sin\theta$ である。
次に、だ円 $A: \frac{x^2}{4} + y^2 = 1$ 上の任意の点 $(x, y)$ は、パラメータ $\phi$ を用いて $(2\cos\phi, \sin\phi)$ と表すことができる。 この点が $M$ によって移る先を $(X, Y)$ とすると、
$$ \begin{pmatrix} X \\ Y \end{pmatrix} = \begin{pmatrix} \frac{1}{2}\cos\theta & b \\ \sin\theta & d \end{pmatrix} \begin{pmatrix} 2\cos\phi \\ \sin\phi \end{pmatrix} = \begin{pmatrix} \cos\theta\cos\phi + b\sin\phi \\ 2\sin\theta\cos\phi + d\sin\phi \end{pmatrix} $$
この点 $(X, Y)$ がだ円 $B: X^2 + \frac{Y^2}{4} = 1$ 上にあるので、
$$ (\cos\theta\cos\phi + b\sin\phi)^2 + \frac{1}{4}(2\sin\theta\cos\phi + d\sin\phi)^2 = 1 $$
左辺を展開して整理すると、
$$ (\cos^2\theta + \sin^2\theta)\cos^2\phi + (2b\cos\theta + d\sin\theta)\cos\phi\sin\phi + \left(b^2 + \frac{d^2}{4}\right)\sin^2\phi = 1 $$
$$ \cos^2\phi + (2b\cos\theta + d\sin\theta)\cos\phi\sin\phi + \left(b^2 + \frac{d^2}{4}\right)\sin^2\phi = \cos^2\phi + \sin^2\phi $$
両辺を比較すると、これが任意の $\phi$ について恒等的に成り立つための条件は、
$$ \begin{cases} 2b\cos\theta + d\sin\theta = 0 \\ b^2 + \frac{d^2}{4} = 1 \end{cases} $$
第1式より、ベクトル $(2b, d)$ はベクトル $(\cos\theta, \sin\theta)$ と直交するため、実数 $k$ を用いて $(2b, d) = k(-\sin\theta, \cos\theta)$ とおける。 すなわち、$b = -\frac{1}{2}k\sin\theta, d = k\cos\theta$ となる。 これを第2式 $4b^2 + d^2 = 4$ に代入すると、
$$ 4\left(-\frac{1}{2}k\sin\theta\right)^2 + (k\cos\theta)^2 = 4 $$
$$ k^2(\sin^2\theta + \cos^2\theta) = 4 $$
$$ k = \pm 2 $$
よって、$b = \mp\sin\theta, d = \pm 2\cos\theta$ (複号同順)と求まる。 ゆえに、求める行列は以下の2つである。
$$ \begin{pmatrix} \frac{1}{2}\cos\theta & -\sin\theta \\ \sin\theta & 2\cos\theta \end{pmatrix}, \quad \begin{pmatrix} \frac{1}{2}\cos\theta & \sin\theta \\ \sin\theta & -2\cos\theta \end{pmatrix} $$
(2)
だ円 $A$ をだ円 $B$ に移す1次変換 $f$ の行列を $M$ とする。(1) の議論から、点 $(2,0)$ の移動先 $P$ を $(\cos\alpha, 2\sin\alpha)$ とおくと、$M$ は
$$ M = \begin{pmatrix} \frac{1}{2}\cos\alpha & -\sin\alpha \\ \sin\alpha & 2\cos\alpha \end{pmatrix} \quad \text{または} \quad M = \begin{pmatrix} \frac{1}{2}\cos\alpha & \sin\alpha \\ \sin\alpha & -2\cos\alpha \end{pmatrix} $$
と表される。 点 $(0,1)$ の移動先 $Q$ は、$Q = M \begin{pmatrix} 0 \\ 1 \end{pmatrix}$ であるから、前者のとき $Q = \begin{pmatrix} -\sin\alpha \\ 2\cos\alpha \end{pmatrix}$、後者のとき $Q = \begin{pmatrix} \sin\alpha \\ -2\cos\alpha \end{pmatrix}$ となる。 どちらの場合も、2つのベクトルは以下のように表せる。
$$ \vec{OP} = \begin{pmatrix} \cos\alpha \\ 2\sin\alpha \end{pmatrix}, \quad \vec{OQ} = \pm \begin{pmatrix} -\sin\alpha \\ 2\cos\alpha \end{pmatrix} $$
$\angle POQ$ が最小となるとき、$\angle POQ$ は $0 \le \angle POQ \le \pi$ の範囲であるため、$\cos\angle POQ$ は最大となる。 内積と大きさをそれぞれ計算する。
$$ \vec{OP} \cdot \vec{OQ} = \pm (-\cos\alpha\sin\alpha + 4\sin\alpha\cos\alpha) = \pm 3\sin\alpha\cos\alpha = \pm \frac{3}{2}\sin 2\alpha $$
$$ |\vec{OP}|^2 = \cos^2\alpha + 4\sin^2\alpha = 1 + 3\sin^2\alpha $$
$$ |\vec{OQ}|^2 = \sin^2\alpha + 4\cos^2\alpha = 1 + 3\cos^2\alpha $$
$$ |\vec{OP}|^2 |\vec{OQ}|^2 = (1 + 3\sin^2\alpha)(1 + 3\cos^2\alpha) = 1 + 3(\sin^2\alpha + \cos^2\alpha) + 9\sin^2\alpha\cos^2\alpha = 4 + \frac{9}{4}\sin^2 2\alpha $$
したがって、$\cos\angle POQ$ は次のように表される。
$$ \cos\angle POQ = \frac{\vec{OP} \cdot \vec{OQ}}{|\vec{OP}||\vec{OQ}|} = \frac{\pm \frac{3}{2}\sin 2\alpha}{\sqrt{4 + \frac{9}{4}\sin^2 2\alpha}} $$
$\alpha$ は任意の実数値をとることができ、また複号は $f$ の選び方によって正負の好きな方を採用できる。したがって、$\cos\angle POQ$ を最大にするには、$x = |\sin 2\alpha|$ とおいたときの関数
$$ g(x) = \frac{\frac{3}{2}x}{\sqrt{4 + \frac{9}{4}x^2}} \quad (0 \le x \le 1) $$
の最大値を求めればよい。 $x > 0$ において、
$$ g(x) = \frac{\frac{3}{2}}{\sqrt{\frac{4}{x^2} + \frac{9}{4}}} $$
と変形すると、分母は $x$ が大きいほど小さくなるため、$g(x)$ は単調増加である。 よって、$x = 1$ のとき最大値をとる。
$$ g(1) = \frac{\frac{3}{2}}{\sqrt{4 + \frac{9}{4}}} = \frac{\frac{3}{2}}{\sqrt{\frac{25}{4}}} = \frac{3}{5} $$
以上より、求める $\cos\angle POQ$ の値は $\frac{3}{5}$ である。
解法2
(1) 直交行列を用いた別解
だ円 $A: \frac{x^2}{4} + y^2 = 1$ 上の点 $(x, y)$ は、行列 $T = \begin{pmatrix} 1/2 & 0 \\ 0 & 1 \end{pmatrix}$ によって $\begin{pmatrix} x' \\ y' \end{pmatrix} = T \begin{pmatrix} x \\ y \end{pmatrix}$ と変換すると $x'^2 + y'^2 = 1$ となり、単位円上の点に移る。 同様に、だ円 $B: X^2 + \frac{Y^2}{4} = 1$ 上の点 $(X, Y)$ は、$S = \begin{pmatrix} 1 & 0 \\ 0 & 1/2 \end{pmatrix}$ によって $\begin{pmatrix} X' \\ Y' \end{pmatrix} = S \begin{pmatrix} X \\ Y \end{pmatrix}$ と変換すると単位円上の点に移る。
$M$ はだ円 $A$ をだ円 $B$ に移す1次変換であるから、$S M T^{-1}$ は単位円を単位円に移す1次変換となり、これは直交行列 $R$ である。 したがって、$S M T^{-1} = R$ より、$M = S^{-1} R T = \begin{pmatrix} 1 & 0 \\ 0 & 2 \end{pmatrix} R \begin{pmatrix} 1/2 & 0 \\ 0 & 1 \end{pmatrix}$ と表せる。
条件より $M \begin{pmatrix} 2 \\ 0 \end{pmatrix} = \begin{pmatrix} \cos\theta \\ 2\sin\theta \end{pmatrix}$ であるから、
$$ \begin{pmatrix} 1 & 0 \\ 0 & 2 \end{pmatrix} R \begin{pmatrix} 1/2 & 0 \\ 0 & 1 \end{pmatrix} \begin{pmatrix} 2 \\ 0 \end{pmatrix} = \begin{pmatrix} \cos\theta \\ 2\sin\theta \end{pmatrix} $$
$$ \begin{pmatrix} 1 & 0 \\ 0 & 2 \end{pmatrix} R \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \begin{pmatrix} \cos\theta \\ 2\sin\theta \end{pmatrix} $$
両辺に $\begin{pmatrix} 1 & 0 \\ 0 & 1/2 \end{pmatrix}$ を左から掛けると、
$$ R \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \begin{pmatrix} \cos\theta \\ \sin\theta \end{pmatrix} $$
$R$ は直交行列であるため、その列ベクトルは互いに直交する単位ベクトルをなす。 第1列が $\begin{pmatrix} \cos\theta \\ \sin\theta \end{pmatrix}$ であることから、第2列は $\begin{pmatrix} -\sin\theta \\ \cos\theta \end{pmatrix}$ または $\begin{pmatrix} \sin\theta \\ -\cos\theta \end{pmatrix}$ となる。 したがって、
$$ R = \begin{pmatrix} \cos\theta & \mp\sin\theta \\ \sin\theta & \pm\cos\theta \end{pmatrix} \quad (\text{複号同順}) $$
よって、$M$ は
$$ M = \begin{pmatrix} 1 & 0 \\ 0 & 2 \end{pmatrix} \begin{pmatrix} \cos\theta & \mp\sin\theta \\ \sin\theta & \pm\cos\theta \end{pmatrix} \begin{pmatrix} 1/2 & 0 \\ 0 & 1 \end{pmatrix} = \begin{pmatrix} \frac{1}{2}\cos\theta & \mp\sin\theta \\ \sin\theta & \pm 2\cos\theta \end{pmatrix} \quad (\text{複号同順}) $$
と求まる。
解説
だ円からだ円への1次変換というテーマは、行列を用いた幾何の分野で頻出である。 解法1のように素直に恒等式として成分を比較していく方法が最も確実であるが、解法2のように「だ円をいったん単位円に引き伸ばし(または縮め)てから、直交行列で回転・折り返しを行い、再びだ円に戻す」という見方をすると、計算量が劇的に減り見通しが良くなる。 (2) は、得られた行列を用いて内積の式を立て、分数関数の最大値を求める問題に帰着させる。微分を使わずとも、分母・分子を $x$ で割ることで単調性が簡単に示せる形になっている点もポイントである。
答え
(1)
$$ \begin{pmatrix} \frac{1}{2}\cos\theta & -\sin\theta \\ \sin\theta & 2\cos\theta \end{pmatrix}, \quad \begin{pmatrix} \frac{1}{2}\cos\theta & \sin\theta \\ \sin\theta & -2\cos\theta \end{pmatrix} $$
(1つの式で $\begin{pmatrix} \frac{1}{2}\cos\theta & \mp\sin\theta \\ \sin\theta & \pm 2\cos\theta \end{pmatrix}$ (複号同順) と書いてもよい)
(2)
$$ \frac{3}{5} $$
この問題の前に見る基礎問題


類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。