東京大学 1979年 理系 第6問 解説
方針・初手
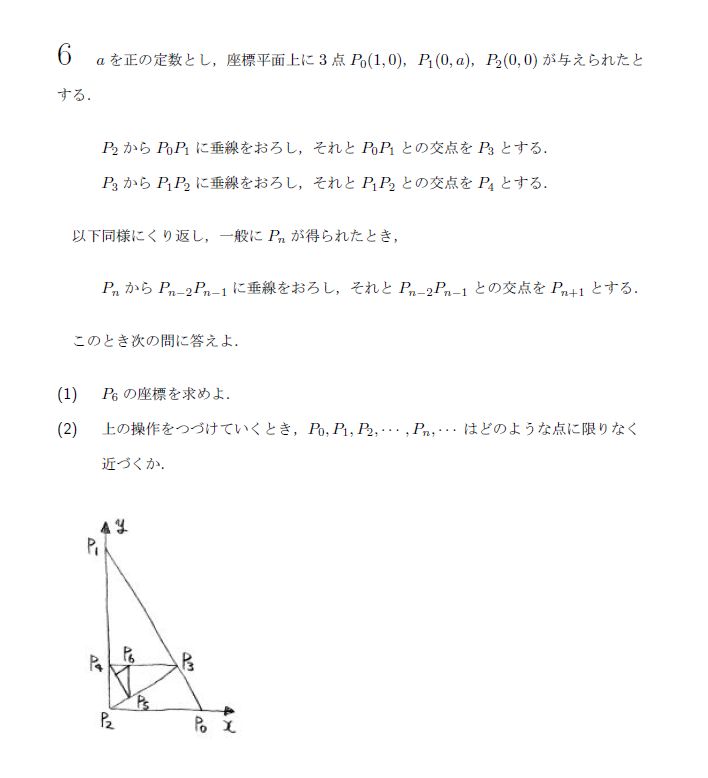
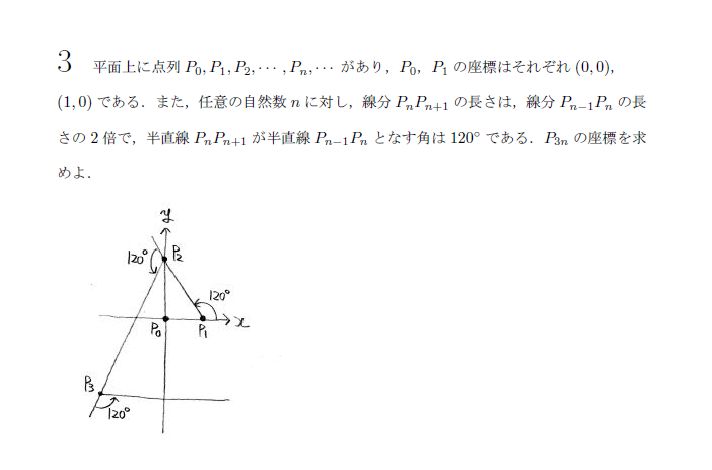
与えられた操作は「直角三角形の直角頂点から斜辺に垂線を下ろす」ことの繰り返しであり、これにより元の直角三角形と相似な直角三角形が次々と生成される。 (1)は $P_6$ までと有限回の操作であるため、直線の方程式を立てて交点の座標を直接計算することで求められる。 (2)は無限回の操作を扱うため、点列がなす幾何学的な相似性と回転に注目し、複素数平面上の一次変換や行列を用いた漸化式に帰着させると見通し良く解くことができる。
解法1
(1) 点 $P_n$ の座標を求めていく。与えられた条件より、$P_0(1, 0), P_1(0, a), P_2(0, 0)$ である。
直線 $P_0 P_1$ の方程式は
$$ ax + y = a $$
である。$P_2(0, 0)$ を通り、直線 $P_0 P_1$ に垂直な直線 $P_2 P_3$ の方程式は
$$ x - ay = 0 \iff x = ay $$
である。これらを連立して $P_3$ の座標を求める。$x = ay$ を $ax + y = a$ に代入して
$$ a(ay) + y = a \iff (a^2 + 1)y = a \iff y = \frac{a}{a^2 + 1} $$
このとき $x = a \cdot \frac{a}{a^2 + 1} = \frac{a^2}{a^2 + 1}$ となるため、
$$ P_3 \left( \frac{a^2}{a^2 + 1}, \frac{a}{a^2 + 1} \right) $$
$P_4$ は $P_3$ から直線 $P_1 P_2$($y$ 軸)に下ろした垂線の足であるから、$x$ 座標は $0$、$y$ 座標は $P_3$ と等しい。
$$ P_4 \left( 0, \frac{a}{a^2 + 1} \right) $$
直線 $P_2 P_3$ の方程式は $x - ay = 0$ であり、$P_4$ を通りこれに垂直な直線 $P_4 P_5$ の傾きは $-a$ であるから、その方程式は
$$ y - \frac{a}{a^2 + 1} = -a(x - 0) \iff ax + y = \frac{a}{a^2 + 1} $$
これと $x - ay = 0$ を連立して $P_5$ の座標を求める。$x = ay$ を代入して
$$ a(ay) + y = \frac{a}{a^2 + 1} \iff (a^2 + 1)y = \frac{a}{a^2 + 1} \iff y = \frac{a}{(a^2 + 1)^2} $$
このとき $x = a \cdot \frac{a}{(a^2 + 1)^2} = \frac{a^2}{(a^2 + 1)^2}$ となるため、
$$ P_5 \left( \frac{a^2}{(a^2 + 1)^2}, \frac{a}{(a^2 + 1)^2} \right) $$
直線 $P_3 P_4$ は $x$ 軸に平行な直線 $y = \frac{a}{a^2 + 1}$ である。$P_6$ は $P_5$ から直線 $P_3 P_4$ に下ろした垂線の足であるから、$x$ 座標は $P_5$ と等しく、$y$ 座標は直線 $P_3 P_4$ と等しい。
$$ P_6 \left( \frac{a^2}{(a^2 + 1)^2}, \frac{a}{a^2 + 1} \right) $$
(2) 点列がなす図形の幾何学的性質に注目し、複素数平面上で考える。点 $P_n$ の表す複素数を $z_n$ とする。 $\triangle P_0 P_1 P_2$ は $\angle P_2 = 90^\circ$ の直角三角形である。 操作の定義より、$P_{n+3}$ は直角三角形 $\triangle P_n P_{n+1} P_{n+2}$($\angle P_{n+2} = 90^\circ$)の直角頂点 $P_{n+2}$ から斜辺 $P_n P_{n+1}$ に下ろした垂線の足となる。 直角三角形を直角頂点からの垂線で分割してできる三角形は元の三角形と相似であるから、
$$ \triangle P_n P_{n+1} P_{n+2} \sim \triangle P_{n+2} P_{n+1} P_{n+3} \sim \triangle P_{n+2} P_{n+3} P_{n+4} $$
が成り立ち、頂点の対応は $P_n \to P_{n+2}, P_{n+1} \to P_{n+3}, P_{n+2} \to P_{n+4}$ となる。この変換は、平面上での反時計回りに $-\frac{\pi}{2}$ の回転と、定数倍の拡大縮小を伴う向きを保つ相似変換である。 したがって、ある複素数 $\alpha, \beta$ を用いて
$$ z_{n+2} = \alpha z_n + \beta $$
と表すことができる。$n=0$ のとき、
$$ z_0 = 1, \quad z_1 = ai, \quad z_2 = 0 $$
(1) の結果から、
$$ z_3 = \frac{a^2}{a^2 + 1} + \frac{a}{a^2 + 1}i, \quad z_4 = \frac{a}{a^2 + 1}i $$
$z_2 = \alpha z_0 + \beta$ より
$$ 0 = \alpha \cdot 1 + \beta \iff \beta = -\alpha $$
$z_4 = \alpha z_2 + \beta$ より
$$ \frac{a}{a^2 + 1}i = \alpha \cdot 0 + \beta \iff \beta = \frac{a}{a^2 + 1}i $$
よって、$\alpha = -\frac{a}{a^2 + 1}i$ と定まる。 このとき $\alpha z_1 + \beta = \left(-\frac{a}{a^2 + 1}i\right)(ai) + \frac{a}{a^2 + 1}i = \frac{a^2}{a^2 + 1} + \frac{a}{a^2 + 1}i = z_3$ となり、$z_3 = \alpha z_1 + \beta$ も満たしている。 ゆえに、任意の $n$ について以下の漸化式が成り立つ。
$$ z_{n+2} = -\frac{a}{a^2 + 1}i z_n + \frac{a}{a^2 + 1}i $$
$a > 0$ より $a^2 + 1 > a$ であるから、公比の絶対値 $|\alpha| = \frac{a}{a^2 + 1} < 1$ である。 したがって、$m \to \infty$ のとき $\alpha^m \to 0$ となり、数列 $\{z_{2m}\}$ および $\{z_{2m+1}\}$ はともに同じ極限値 $z_\infty$ に収束する。 極限値 $z_\infty$ は漸化式の不動点方程式 $z_\infty = \alpha z_\infty + \beta$ を満たすから、
$$ z_\infty = \frac{\beta}{1 - \alpha} = \frac{\frac{a}{a^2 + 1}i}{1 + \frac{a}{a^2 + 1}i} = \frac{ai}{a^2 + 1 + ai} $$
分母の実数化を行う。
$$ \begin{aligned} z_\infty &= \frac{ai(a^2 + 1 - ai)}{(a^2 + 1 + ai)(a^2 + 1 - ai)} \\ &= \frac{a^2 + a(a^2 + 1)i}{(a^2 + 1)^2 + a^2} \\ &= \frac{a^2 + a(a^2 + 1)i}{a^4 + 3a^2 + 1} \end{aligned} $$
よって、点列が限りなく近づく点は、この複素数の実部と虚部を座標とする点である。
解法2
(1) $\vec{v}_n = \overrightarrow{P_n P_{n+1}}$ とおく。 解法1の(2)で述べた幾何学的考察から、有向線分 $P_n P_{n+1}$ から $P_{n+2} P_{n+3}$ への変換は、時計回りに $90^\circ$($-\frac{\pi}{2}$)の回転と、相似比 $\frac{P_2 P_3}{P_0 P_1} = \frac{\frac{a}{\sqrt{a^2+1}}}{\sqrt{a^2+1}} = \frac{a}{a^2+1}$ 倍の拡大縮小の合成である。 したがって、回転行列を用いて $\vec{v}_{n+2}$ と $\vec{v}_n$ の関係は次のように表せる。
$$ \vec{v}_{n+2} = \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} \vec{v}_n $$
初期ベクトルは $\vec{v}_0 = \begin{pmatrix} -1 \\ a \end{pmatrix}, \vec{v}_1 = \begin{pmatrix} 0 \\ -a \end{pmatrix}$ である。 これを用いて $\vec{v}_2$ から $\vec{v}_5$ を順次計算する。
$$ \begin{aligned} \vec{v}_2 &= \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} -1 \\ a \end{pmatrix} = \frac{a}{a^2+1} \begin{pmatrix} a \\ 1 \end{pmatrix} \\ \vec{v}_3 &= \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} 0 \\ -a \end{pmatrix} = \frac{a}{a^2+1} \begin{pmatrix} -a \\ 0 \end{pmatrix} \\ \vec{v}_4 &= \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} \vec{v}_2 = \frac{a^2}{(a^2+1)^2} \begin{pmatrix} 1 \\ -a \end{pmatrix} \\ \vec{v}_5 &= \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix} \vec{v}_3 = \frac{a^2}{(a^2+1)^2} \begin{pmatrix} 0 \\ a \end{pmatrix} \end{aligned} $$
$P_2(0, 0)$ であるから、$\overrightarrow{OP_6} = \overrightarrow{OP_2} + \vec{v}_2 + \vec{v}_3 + \vec{v}_4 + \vec{v}_5 = \vec{v}_2 + \vec{v}_3 + \vec{v}_4 + \vec{v}_5$ となる。
$$ \begin{aligned} \vec{v}_2 + \vec{v}_3 &= \frac{a}{a^2+1} \begin{pmatrix} 0 \\ 1 \end{pmatrix} \\ \vec{v}_4 + \vec{v}_5 &= \frac{a^2}{(a^2+1)^2} \begin{pmatrix} 1 \\ 0 \end{pmatrix} \end{aligned} $$
これらを足し合わせて、
$$ \overrightarrow{OP_6} = \begin{pmatrix} \frac{a^2}{(a^2+1)^2} \\ \frac{a}{a^2+1} \end{pmatrix} $$
よって、$P_6 \left( \frac{a^2}{(a^2+1)^2}, \frac{a}{a^2+1} \right)$。
(2) 行列 $A = \frac{a}{a^2+1} \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix}$ とおく。$\vec{u}_j = \vec{v}_{2j} + \vec{v}_{2j+1}$ と定義すると、 $\vec{v}_{2j+2} = A \vec{v}_{2j}$ および $\vec{v}_{2j+3} = A \vec{v}_{2j+1}$ より、$\vec{u}_{j+1} = A \vec{u}_j$ が成り立つ。 ここで、$\vec{u}_0 = \vec{v}_0 + \vec{v}_1 = \begin{pmatrix} -1 \\ 0 \end{pmatrix}$ である。 点列の極限の座標ベクトル $\vec{P}_\infty$ は、無限級数を用いて次のように表せる。
$$ \vec{P}_\infty = \overrightarrow{OP_0} + \sum_{j=0}^{\infty} \vec{u}_j = \begin{pmatrix} 1 \\ 0 \end{pmatrix} + \sum_{j=0}^{\infty} A^j \vec{u}_0 $$
等比行列級数の和 $S = \sum_{j=0}^{\infty} A^j \vec{u}_0$ を求める。$(E - A)S = \vec{u}_0$ より $S = (E - A)^{-1} \vec{u}_0$ である($E$ は単位行列)。
$$ E - A = \begin{pmatrix} 1 & -\frac{a}{a^2+1} \\ \frac{a}{a^2+1} & 1 \end{pmatrix} $$
この行列の行列式は $\Delta = 1 + \left( \frac{a}{a^2+1} \right)^2 = \frac{(a^2+1)^2 + a^2}{(a^2+1)^2} = \frac{a^4+3a^2+1}{(a^2+1)^2}$ である。逆行列を求めて $S$ を計算する。
$$ \begin{aligned} S &= \frac{(a^2+1)^2}{a^4+3a^2+1} \begin{pmatrix} 1 & \frac{a}{a^2+1} \\ -\frac{a}{a^2+1} & 1 \end{pmatrix} \begin{pmatrix} -1 \\ 0 \end{pmatrix} \\ &= \frac{(a^2+1)^2}{a^4+3a^2+1} \begin{pmatrix} -1 \\ \frac{a}{a^2+1} \end{pmatrix} \\ &= \begin{pmatrix} -\frac{(a^2+1)^2}{a^4+3a^2+1} \\ \frac{a(a^2+1)}{a^4+3a^2+1} \end{pmatrix} \end{aligned} $$
したがって、求める極限の座標は
$$ \vec{P}_\infty = \begin{pmatrix} 1 \\ 0 \end{pmatrix} + \begin{pmatrix} -\frac{(a^2+1)^2}{a^4+3a^2+1} \\ \frac{a(a^2+1)}{a^4+3a^2+1} \end{pmatrix} = \begin{pmatrix} \frac{a^4+3a^2+1 - (a^4+2a^2+1)}{a^4+3a^2+1} \\ \frac{a(a^2+1)}{a^4+3a^2+1} \end{pmatrix} = \begin{pmatrix} \frac{a^2}{a^4+3a^2+1} \\ \frac{a(a^2+1)}{a^4+3a^2+1} \end{pmatrix} $$
となる。
解説
直角三角形の直角頂点から斜辺に垂線を下ろす操作を繰り返すことで、元の図形と相似な図形が次々と作られるという幾何学的な性質に気づけるかが鍵である。 (1)のように地道に直線の方程式を連立して座標を求めることも可能だが、(2)の極限を求める上では、点列の推移を一次変換(複素数平面や回転行列)として捉える視点が極めて有効である。 相似変換の公比(縮小率)が1より小さいことを確認し、等比級数の和や漸化式の不動点として極限を導く手法は難関大学で頻出のテーマである。
答え
(1)
$P_6 \left( \frac{a^2}{(a^2 + 1)^2}, \frac{a}{a^2 + 1} \right)$
(2)
点 $\left( \frac{a^2}{a^4+3a^2+1}, \frac{a(a^2+1)}{a^4+3a^2+1} \right)$ に限りなく近づく。
この問題の前に見る基礎問題
/04032601.png)
/04090307.png)
/04101917.png)
/05050904.png)
/14121202.png)
/16021105.png)
類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。