京都大学 1983年 文系 第3問 解説
方針・初手
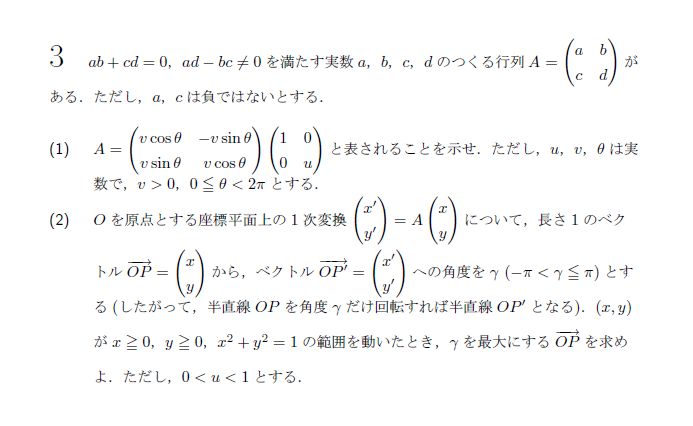
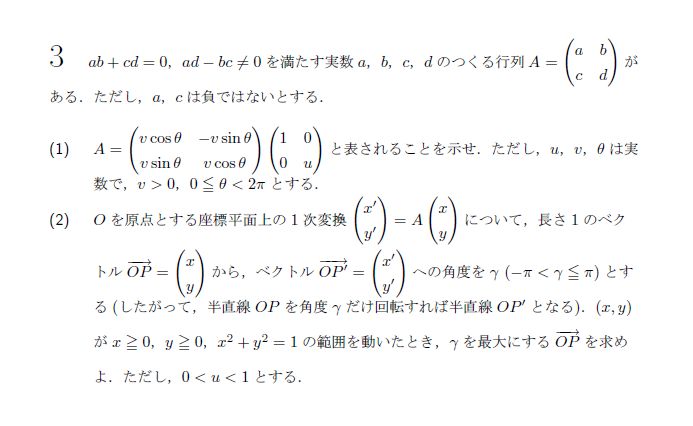
(1) は、条件式を用いて行列 $A$ の成分を三角関数を用いた形に変形する問題である。着眼点としては、$v^2 = a^2 + c^2$ とおき、$a = v \cos \theta, c = v \sin \theta$ と設定することである。その上で、内積 $ab+cd=0$ の条件からベクトル $\begin{pmatrix} b \\ d \end{pmatrix}$ の方向を決定し、行列の積の形へ持ち込む。
(2) は、(1) で示した行列の分解を活用して図形的に考えるアプローチ(解法1)と、成分計算から $\tan \gamma$ の関数を作り、微分して最大値を求めるアプローチ(解法2)が考えられる。1次変換 $A$ を「$y$ 軸方向の $u$ 倍の縮小」と「原点中心の $\theta$ 回転」の合成とみなす解法1の方が計算負担が少なく見通しがよい。
解法1
(1) 行列 $A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$ について、$a \ge 0, c \ge 0$ である。 $v = \sqrt{a^2+c^2}$ とおく。 もし $v=0$ とすると $a=c=0$ となり、$ad-bc=0$ となって $ad-bc \neq 0$ の条件に矛盾する。したがって $v>0$ である。 このとき、$\left(\frac{a}{v}\right)^2 + \left(\frac{c}{v}\right)^2 = 1$ が成り立つため、
$$ \cos \theta = \frac{a}{v}, \quad \sin \theta = \frac{c}{v} $$
を満たす実数 $\theta$ ($0 \leqq \theta < 2\pi$)がただ一つ存在する。 これにより $a = v \cos \theta, c = v \sin \theta$ と表せる。
条件 $ab+cd=0$ に代入すると、
$$ (v \cos \theta)b + (v \sin \theta)d = 0 $$
$v>0$ より、
$$ b \cos \theta + d \sin \theta = 0 $$
これはベクトル $\begin{pmatrix} \cos \theta \\ \sin \theta \end{pmatrix}$ と $\begin{pmatrix} b \\ d \end{pmatrix}$ が直交していることを意味する。 よって、ある実数 $w$ を用いて
$$ b = -w \sin \theta, \quad d = w \cos \theta $$
と表せる。 このとき、$ad-bc$ を計算すると、
$$ ad-bc = (v \cos \theta)(w \cos \theta) - (-w \sin \theta)(v \sin \theta) = vw(\cos^2 \theta + \sin^2 \theta) = vw $$
条件 $ad-bc \neq 0$ より $vw \neq 0$。$v>0$ であるから $w \neq 0$ である。 ここで $u = \frac{w}{v}$ とおくと、$u$ は 0 でない実数であり、$w = uv$ となる。 これを代入して、
$$ b = -uv \sin \theta, \quad d = uv \cos \theta $$
以上より、行列 $A$ は次のように表される。
$$ A = \begin{pmatrix} v \cos \theta & -uv \sin \theta \\ v \sin \theta & uv \cos \theta \end{pmatrix} = \begin{pmatrix} v \cos \theta & -v \sin \theta \\ v \sin \theta & v \cos \theta \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & u \end{pmatrix} $$
ここで、$u, v, \theta$ は実数であり、$v>0, 0 \leqq \theta < 2\pi$ を満たすことが示された。(証明終)
(2) $\overrightarrow{OP} = \begin{pmatrix} x \\ y \end{pmatrix}$ とおく。条件 $x \geqq 0, y \geqq 0, x^2+y^2=1$ より、$\overrightarrow{OP} = \begin{pmatrix} \cos \phi \\ \sin \phi \end{pmatrix}$ ($0 \leqq \phi \leqq \frac{\pi}{2}$)とおける。 (1) の結果より、$\overrightarrow{OP'} = A \overrightarrow{OP}$ は、まず $\overrightarrow{OQ} = \begin{pmatrix} 1 & 0 \\ 0 & u \end{pmatrix} \begin{pmatrix} \cos \phi \\ \sin \phi \end{pmatrix}$ を行い、その後 $\begin{pmatrix} v \cos \theta & -v \sin \theta \\ v \sin \theta & v \cos \theta \end{pmatrix}$ を掛ける変換である。 後半の行列は「原点中心の $\theta$ 回転」と「$v$ 倍のスカラー倍」の合成である。スカラー倍は角度に影響しないため無視してよい。 $\overrightarrow{OQ} = \begin{pmatrix} \cos \phi \\ u \sin \phi \end{pmatrix}$ とする。 ベクトル $\overrightarrow{OP}$ から $\overrightarrow{OP'}$ への角度 $\gamma$ は、$\overrightarrow{OP}$ から $\overrightarrow{OQ}$ への角度を $\alpha$ とすると、回転角 $\theta$ を加えて
$$ \gamma = \alpha + \theta $$
となる。 $\overrightarrow{OP}$ と $\overrightarrow{OQ}$ の位置関係(角度 $\alpha$ の正負)を調べるため、外積に相当する成分 $x_P y_Q - y_P x_Q$ を計算する。
$$ \cos \phi \cdot (u \sin \phi) - \sin \phi \cdot \cos \phi = (u-1)\sin \phi \cos \phi = \frac{u-1}{2} \sin 2\phi $$
条件より $0 < u < 1$ であり、$0 \leqq \phi \leqq \frac{\pi}{2}$ であるから $\sin 2\phi \geqq 0$ となる。 したがって、$\frac{u-1}{2} \sin 2\phi \leqq 0$ である。 これは、ベクトル $\overrightarrow{OQ}$ が $\overrightarrow{OP}$ に対して時計回りの方向(負の角度の方向)にあることを意味し、$\alpha \leqq 0$ となる。 ゆえに、$\gamma = \theta + \alpha \leqq \theta$ であり、$\gamma$ は $\alpha = 0$ のときに最大値 $\theta$ をとる。 $\alpha = 0$ となるのは $\frac{u-1}{2} \sin 2\phi = 0$ のときであり、これは $\sin 2\phi = 0$ すなわち $\phi = 0$ または $\phi = \frac{\pi}{2}$ のときである。 このとき、$\overrightarrow{OP} = \begin{pmatrix} 1 \\ 0 \end{pmatrix}$ または $\overrightarrow{OP} = \begin{pmatrix} 0 \\ 1 \end{pmatrix}$ となる。
解法2
(2)の別解(正接と微分によるアプローチ) $\overrightarrow{OP} = \begin{pmatrix} \cos \phi \\ \sin \phi \end{pmatrix}$ ($0 \leqq \phi \leqq \frac{\pi}{2}$)とおく。
$$ \begin{pmatrix} x' \\ y' \end{pmatrix} = v \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & u \end{pmatrix} \begin{pmatrix} \cos \phi \\ \sin \phi \end{pmatrix} = v \begin{pmatrix} \cos \theta \cos \phi - u \sin \theta \sin \phi \\ \sin \theta \cos \phi + u \cos \theta \sin \phi \end{pmatrix} $$
ベクトル $\overrightarrow{OP'}$ の偏角を $\psi$ とすると、求める角度は $\gamma = \psi - \phi$ である。
$$ \tan \gamma = \tan(\psi - \phi) = \frac{\tan \psi - \tan \phi}{1 + \tan \psi \tan \phi} = \frac{\frac{y'}{x'} - \frac{y}{x}}{1 + \frac{y'}{x'}\frac{y}{x}} = \frac{x y' - y x'}{x x' + y y'} $$
分子を計算すると、
$$ x y' - y x' = v \{ \cos \phi (\sin \theta \cos \phi + u \cos \theta \sin \phi) - \sin \phi (\cos \theta \cos \phi - u \sin \theta \sin \phi) \} $$
$$ = v \{ \sin \theta (\cos^2 \phi + u \sin^2 \phi) - (1-u)\cos \theta \sin \phi \cos \phi \} $$
分母を計算すると、
$$ x x' + y y' = v \{ \cos \phi (\cos \theta \cos \phi - u \sin \theta \sin \phi) + \sin \phi (\sin \theta \cos \phi + u \cos \theta \sin \phi) \} $$
$$ = v \{ \cos \theta (\cos^2 \phi + u \sin^2 \phi) + (1-u)\sin \theta \sin \phi \cos \phi \} $$
分母・分子を $v \cos^2 \phi$ で割り、$t = \tan \phi$ ($t \geqq 0$) とおくと、
$$ \tan \gamma = \frac{\sin \theta (1+ut^2) - (1-u)\cos \theta \cdot t}{\cos \theta (1+ut^2) + (1-u)\sin \theta \cdot t} = f(t) $$
$f(t)$ を $t$ で微分する。商の微分公式より、分子の $f'(t)$ の符号を決定する部分(分子を微分×分母 - 分子×分母を微分)を計算すると、整理の末に
$$ (1-u)(ut^2-1) $$
となる。 $0<u<1$ より $1-u > 0$ であるため、$f'(t) = 0$ となるのは $ut^2 = 1 \iff t = \frac{1}{\sqrt{u}}$ のときである。 増減を調べると、$0 \leqq t < \frac{1}{\sqrt{u}}$ では $f'(t) < 0$ で減少、$t > \frac{1}{\sqrt{u}}$ では $f'(t) > 0$ で増加する。 したがって、定義域 $0 \leqq t < \infty$ における最大値は、両端の $t=0$ および $t \to \infty$ のときに生じる。 $t=0$ のとき $\phi = 0$、 $t \to \infty$ のとき $\phi = \frac{\pi}{2}$ であり、どちらの極限でも $f(t) \to \tan \theta$ となるため、$\gamma$ の最大値は $\theta$ である。 対応するベクトルは $\overrightarrow{OP} = \begin{pmatrix} 1 \\ 0 \end{pmatrix}$ および $\begin{pmatrix} 0 \\ 1 \end{pmatrix}$ である。
解説
(1) は、条件式から三角関数を自ら持ち出し、1次変換の行列表現(回転と伸縮の合成)を導き出す構成力が問われる。$a^2+c^2 \neq 0$ を示して比をとる操作は典型的なので確実に押さえたいところである。 (2) は、行列を分解した意味を正しく図形的に捉えられるかが鍵である。$u$ 倍の操作が「偏角を小さくする方向への偏角のズレ」を生むことに気づけば、解法1のように直感的に答えを出すことができる。解法2のように強引に微分して求めることも可能であるが、数式処理の正確性が強く求められる。
答え
(1)
略(解法1の証明を参照)
(2)
$$ \begin{pmatrix} 1 \\ 0 \end{pmatrix}, \quad \begin{pmatrix} 0 \\ 1 \end{pmatrix} $$
この問題の前に見る基礎問題






類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。