東北大学 2013年 理系 第5問 解説
方針・初手
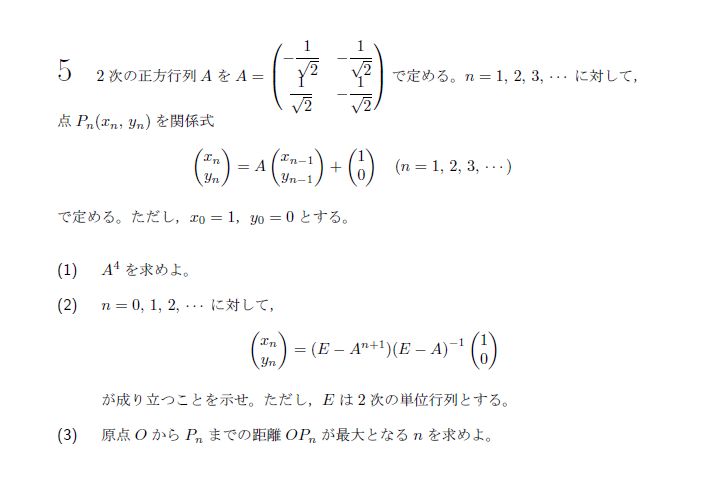
行列
$$ A=\begin{pmatrix} -\dfrac{1}{\sqrt{2}} & -\dfrac{1}{\sqrt{2}}[4pt] \dfrac{1}{\sqrt{2}} & -\dfrac{1}{\sqrt{2}} \end{pmatrix} $$
は
$$ \begin{pmatrix} \cos \dfrac{3\pi}{4} & -\sin \dfrac{3\pi}{4}[4pt] \sin \dfrac{3\pi}{4} & \cos \dfrac{3\pi}{4} \end{pmatrix} $$
であり,角 $\dfrac{3\pi}{4}$ の回転を表す行列である。したがって $A^n$ は角 $\dfrac{3n\pi}{4}$ の回転になる。
また,漸化式は
$$ \begin{pmatrix} x_n\ y_n \end{pmatrix} = A \begin{pmatrix} x_{n-1}\ y_{n-1} \end{pmatrix} + \begin{pmatrix} 1\ 0 \end{pmatrix} $$
であるから,等比数列型の和に直すのが自然である。
解法1
(1)
$A^4$ を求める。
$A$ は角 $\dfrac{3\pi}{4}$ の回転行列であるから,$A^4$ は角
$$ 4\cdot \dfrac{3\pi}{4}=3\pi $$
の回転行列である。これは角 $\pi$ の回転と同じなので,
$$ A^4=-E= \begin{pmatrix} -1 & 0\ 0 & -1 \end{pmatrix} $$
である。
実際に計算しても,
$$ A^2= \begin{pmatrix} 0 & 1\ -1 & 0 \end{pmatrix} $$
より,
$$ A^4=(A^2)^2= \begin{pmatrix} -1 & 0\ 0 & -1 \end{pmatrix} $$
となる。
(2)
$$ \begin{pmatrix} x_n\ y_n \end{pmatrix} =(E-A^{n+1})(E-A)^{-1} \begin{pmatrix} 1\ 0 \end{pmatrix} $$
を示す。
$\boldsymbol{p}_n=\begin{pmatrix}x_n\ y_n\end{pmatrix}$,$\boldsymbol{e}=\begin{pmatrix}1\0\end{pmatrix}$ とおくと,
$$ \boldsymbol{p}*n=A\boldsymbol{p}*{n-1}+\boldsymbol{e},\qquad \boldsymbol{p}_0=\boldsymbol{e} $$
である。
まず,この漸化式から
$$ \boldsymbol{p}_n=(E+A+\cdots +A^n)\boldsymbol{e} $$
が成り立つことを示す。
$n=0$ では明らかである。$n-1$ で成り立つとすると,
$$ \boldsymbol{p}_{n-1}=(E+A+\cdots +A^{n-1})\boldsymbol{e} $$
であるから,
$$ \begin{aligned} \boldsymbol{p}*n &=A\boldsymbol{p}*{n-1}+\boldsymbol{e}\\ &=A(E+A+\cdots +A^{n-1})\boldsymbol{e}+\boldsymbol{e}\\ &=(A+A^2+\cdots +A^n)\boldsymbol{e}+\boldsymbol{e}\\ &=(E+A+\cdots +A^n)\boldsymbol{e} \end{aligned} $$
となる。よって帰納的に成り立つ。
次に,
$$ (E-A)(E+A+\cdots +A^n)=E-A^{n+1} $$
であるから,
$$ E+A+\cdots +A^n=(E-A^{n+1})(E-A)^{-1} $$
となる。ただし,$E-A$ が可逆であることを確認しておくと,
$$ \det(E-A) ========= \begin{vmatrix} 1+\dfrac{1}{\sqrt{2}} & \dfrac{1}{\sqrt{2}}[4pt] -\dfrac{1}{\sqrt{2}} & 1+\dfrac{1}{\sqrt{2}} \end{vmatrix} ============= \left(1+\dfrac{1}{\sqrt{2}}\right)^2+\dfrac12 =2+\sqrt{2}\neq 0 $$
であるから確かに逆行列をもつ。
したがって,
$$ \begin{pmatrix} x_n\ y_n \end{pmatrix} =\boldsymbol{p}_n =(E+A+\cdots +A^n)\boldsymbol{e} =(E-A^{n+1})(E-A)^{-1} \begin{pmatrix} 1\ 0 \end{pmatrix} $$
が成り立つ。
(3) 原点 $O$ から $P_n$ までの距離 $OP_n$ が最大となる $n$ を求める。
点 $(x,y)$ を複素数 $x+iy$ に対応させる。$z_n=x_n+iy_n$ とおく。
行列 $A$ は角 $\dfrac{3\pi}{4}$ の回転を表すから,複素数で表せば $\omega=e^{3\pi i/4}$ を掛けることに対応する。したがって (2) より
$$ z_n=1+\omega+\omega^2+\cdots +\omega^n =\frac{1-\omega^{n+1}}{1-\omega} $$
である。
よって
$$ OP_n=|z_n| =\frac{|1-\omega^{n+1}|}{|1-\omega|} $$
となる。分母は一定であるから,$OP_n$ を最大にするには $|1-\omega^{n+1}|$ を最大にすればよい。
ここで $|\omega|=1$ なので,$\omega^{n+1}$ は単位円上の点である。したがって $|1-\omega^{n+1}|$ は,複素平面で点 $1$ と点 $\omega^{n+1}$ の距離であり,その最大値は $\omega^{n+1}=-1$ のときの $2$ である。
よって必要十分条件は
$$ \omega^{n+1}=-1 $$
すなわち
$$ e^{\frac{3(n+1)\pi i}{4}}=e^{\pi i} $$
である。これより,
$$ \frac{3(n+1)\pi}{4}\equiv \pi \pmod{2\pi} $$
すなわち
$$ 3(n+1)\equiv 4 \pmod{8} $$
となる。$3$ の逆元は法 $8$ で $3$ なので,
$$ n+1\equiv 4 \pmod{8} $$
すなわち
$$ n\equiv 3 \pmod{8} $$
である。
したがって,$OP_n$ が最大となるのは
$$ n=8m+3\qquad (m=0,1,2,\dots) $$
のときである。
解説
この問題の本質は,$A$ を「回転行列」と見抜けるかどうかにある。そうすると $A^4$ はすぐに分かり,漸化式も単なる行列の等比和に直せる。
さらに (3) では,$\begin{pmatrix}x_n\ y_n\end{pmatrix}$ を複素数 $z_n$ に移して
$$ z_n=1+\omega+\cdots +\omega^n $$
とみなすと,距離の最大化が「単位円上の点と $1$ との距離の最大化」に帰着する。計算を力ずくで進めるより,回転と複素数の対応を使うのが最短である。
答え
$$ A^4= \begin{pmatrix} -1 & 0\ 0 & -1 \end{pmatrix} $$
$$ \begin{pmatrix} x_n\ y_n \end{pmatrix} =(E-A^{n+1})(E-A)^{-1} \begin{pmatrix} 1\ 0 \end{pmatrix} $$
$$ OP_n \text{ が最大となるのは } n\equiv 3 \pmod{8} $$
すなわち
$$ n=3,11,19,\dots $$
である。
この問題の前に見る基礎問題

類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。