京都大学 1978年 文系 第4問 解説
方針・初手
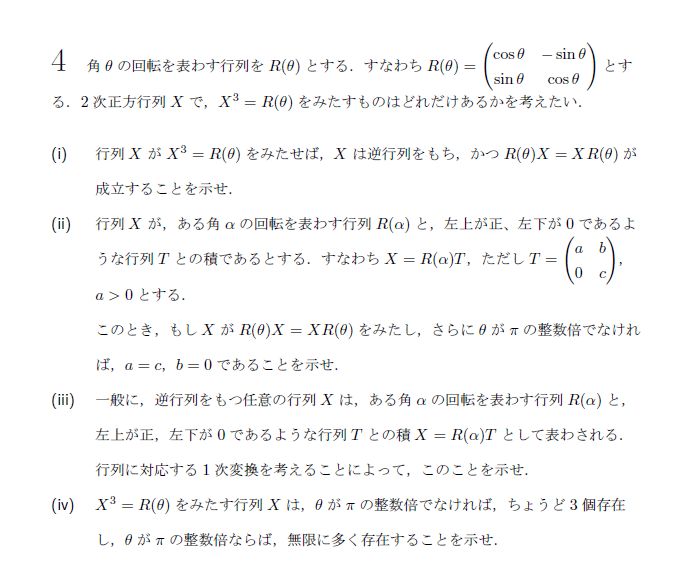
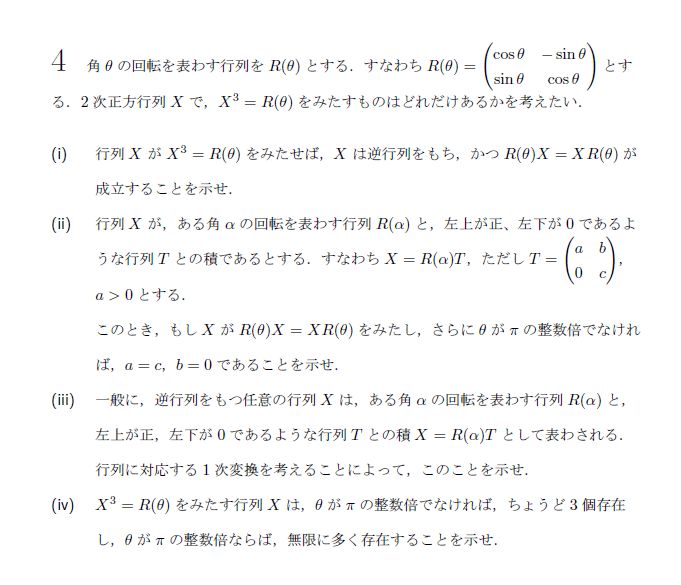
- (i) 与えられた方程式 $X^3 = R(\theta)$ の両辺の行列式を考え、$X$ が逆行列を持つことを示す。また、方程式の両辺に左や右から $X$ を掛けることで可換性を導く。
- (ii) 回転行列同士が可換であること($R(\theta)R(\alpha) = R(\alpha)R(\theta)$)を利用し、$X = R(\alpha)T$ を $R(\theta)X = XR(\theta)$ に代入して成分比較に持ち込む。
- (iii) 逆行列をもつ行列 $X$ を列ベクトルで分割し、第1列のベクトルが $x$ 軸正の向きからどれだけ回転したベクトルか(偏角 $\alpha$)に着目して $R(\alpha)$ をくくり出す。
- (iv) 前問までの結果を統合する。$\theta \neq n\pi$ の場合は $X$ が回転行列の定数倍に限定されることを示して解を絞る。$\theta = n\pi$ の場合は $R(\theta) = \pm I$ となり、相似変換を用いた具体的な解の族を構成して無限に存在することを示す。
解法1
(i)
$X^3 = R(\theta)$ の両辺の行列式をとると、
$$ |X^3| = |R(\theta)| $$
$|R(\theta)| = \cos^2\theta + \sin^2\theta = 1$ より、実数 $|X|$ は $|X|^3 = 1$ を満たし、$|X|=1$ となる。 $|X| \neq 0$ であるから、$X$ は逆行列をもつ。 また、$X^3 = R(\theta)$ の両辺に左から $X$ を掛けると $X^4 = X R(\theta)$、右から $X$ を掛けると $X^4 = R(\theta) X$ となる。 したがって、
$$ R(\theta)X = XR(\theta) $$
が成立する。
(ii)
$X = R(\alpha)T$ を $R(\theta)X = XR(\theta)$ に代入すると、
$$ R(\theta)R(\alpha)T = R(\alpha)TR(\theta) $$
一般に、回転行列同士の積は可換であるから $R(\theta)R(\alpha) = R(\alpha)R(\theta)$ が成り立つ。よって、
$$ R(\alpha)R(\theta)T = R(\alpha)TR(\theta) $$
$R(\alpha)$ は逆行列 $R(-\alpha)$ をもつので、両辺に左から $R(-\alpha)$ を掛けると、
$$ R(\theta)T = TR(\theta) $$
成分で表すと、
$$ \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} \begin{pmatrix} a & b \\ 0 & c \end{pmatrix} = \begin{pmatrix} a & b \\ 0 & c \end{pmatrix} \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} $$
左辺と右辺をそれぞれ計算する。
$$ \text{左辺} = \begin{pmatrix} a\cos \theta & b\cos \theta - c\sin \theta \\ a\sin \theta & b\sin \theta + c\cos \theta \end{pmatrix} $$
$$ \text{右辺} = \begin{pmatrix} a\cos \theta + b\sin \theta & -a\sin \theta + b\cos \theta \\ c\sin \theta & c\cos \theta \end{pmatrix} $$
両辺の成分を比較する。左下成分より、
$$ a\sin \theta = c\sin \theta \iff (a-c)\sin \theta = 0 $$
左上成分より、
$$ a\cos \theta = a\cos \theta + b\sin \theta \iff b\sin \theta = 0 $$
$\theta$ は $\pi$ の整数倍ではないので、$\sin \theta \neq 0$ である。 したがって、$a-c=0$ かつ $b=0$ となり、$a=c, b=0$ であることが示された。
(iii)
逆行列をもつ行列 $X$ を $X = (\vec{x}_1, \vec{x}_2)$ と列ベクトルで表す。$X$ は逆行列をもつため、$\vec{x}_1 \neq \vec{0}$ である。 $X$ が表す1次変換によって、基本ベクトル $\vec{e}_1 = \begin{pmatrix} 1 \\ 0 \end{pmatrix}$ は $\vec{x}_1$ に移される。 ここで、ベクトル $\vec{x}_1$ の偏角を $\alpha$ ($0 \leqq \alpha < 2\pi$)、大きさを $a$ ($a > 0$) とおくと、
$$ \vec{x}_1 = \begin{pmatrix} a\cos \alpha \\ a\sin \alpha \end{pmatrix} = R(\alpha) \begin{pmatrix} a \\ 0 \end{pmatrix} $$
と表せる。 また、$\vec{x}_2$ を $R(-\alpha)$ で回転させたベクトルを $\begin{pmatrix} b \\ c \end{pmatrix}$ とおくと、
$$ \vec{x}_2 = R(\alpha) \begin{pmatrix} b \\ c \end{pmatrix} $$
以上より、行列 $X$ は次のように分解できる。
$$ X = (\vec{x}_1, \vec{x}_2) = \left( R(\alpha) \begin{pmatrix} a \\ 0 \end{pmatrix}, R(\alpha) \begin{pmatrix} b \\ c \end{pmatrix} \right) = R(\alpha) \begin{pmatrix} a & b \\ 0 & c \end{pmatrix} $$
ここで、$T = \begin{pmatrix} a & b \\ 0 & c \end{pmatrix}$ とおくと、$a = |\vec{x}_1| > 0$ であり、左上が正、左下が $0$ の行列となる。 よって、$X = R(\alpha)T$ として表されることが示された。
(iv)
[1] $\theta$ が $\pi$ の整数倍でない場合 $X^3 = R(\theta)$ をみたす行列 $X$ は (i) より逆行列をもつため、(iii) より $X = R(\alpha)T$ ($T = \begin{pmatrix} a & b \\ 0 & c \end{pmatrix}$, $a>0$)と表せる。 さらに (i) と (ii) より、$a=c, b=0$ であるから、$T = \begin{pmatrix} a & 0 \\ 0 & a \end{pmatrix} = aI$ ($I$ は単位行列) となる。 したがって、$X = aR(\alpha)$ である。 $X^3 = a^3 R(3\alpha)$ であり、これが $R(\theta)$ に等しいから、
$$ a^3 R(3\alpha) = R(\theta) $$
両辺の行列式をとると、(i) より $|X|=1$ であったから $(a^2)^3 = 1$、$a>0$ より $a=1$ を得る。 よって $R(3\alpha) = R(\theta)$ となる。これが成り立つのは、
$$ 3\alpha = \theta + 2k\pi \quad (k \text{ は整数}) $$
$$ \alpha = \frac{\theta}{3} + \frac{2k\pi}{3} $$
のときである。$0 \leqq \alpha < 2\pi$ の範囲で考えると、$k=0, 1, 2$ に対応する $3$ つの相異なる回転角が得られる。それぞれ異なる行列 $R(\alpha)$ を定めるため、行列 $X$ はちょうど $3$ 個存在する。
[2] $\theta$ が $\pi$ の整数倍の場合 $\theta = n\pi$ ($n$ は整数)とおける。このとき、$R(\theta) = (-1)^n I$ であるから、方程式は
$$ X^3 = (-1)^n I $$
となる。 ここで、任意の実数 $p \neq 0$ を用いて、行列 $P = \begin{pmatrix} p & 0 \\ 0 & \frac{1}{p} \end{pmatrix}$ を考える。 ある角度 $\phi$ の回転行列 $R(\phi)$ に対して、相似な行列 $X_p = P R(\phi) P^{-1}$ を作ると、
$$ X_p^3 = P R(\phi)^3 P^{-1} = P R(3\phi) P^{-1} $$
となる。ここで $3\phi = n\pi$ となるような $\phi$ を選ぶのではなく、$3\phi = (n+2)\pi$ などと選ぶことで、$\sin\phi \neq 0$ となるようにする。 例えば $3\phi = n\pi + 2\pi$ を満たす $\phi$ を用いると、$R(3\phi) = R(n\pi) = (-1)^n I$ であり、
$$ X_p^3 = P \{(-1)^n I\} P^{-1} = (-1)^n I $$
を満たす。$X_p$ を具体的に計算すると、
$$ X_p = \begin{pmatrix} p & 0 \\ 0 & \frac{1}{p} \end{pmatrix} \begin{pmatrix} \cos\phi & -\sin\phi \\ \sin\phi & \cos\phi \end{pmatrix} \begin{pmatrix} \frac{1}{p} & 0 \\ 0 & p \end{pmatrix} = \begin{pmatrix} \cos\phi & -p^2 \sin\phi \\ \frac{1}{p^2}\sin\phi & \cos\phi \end{pmatrix} $$
$\sin\phi \neq 0$ であるため、正の実数 $p$ を変えることで、右上の成分 $-p^2 \sin\phi$ は連続的に様々な値をとり得る。 したがって、条件を満たす互いに異なる行列 $X_p$ は無数に構成できる。 よって、無限に多く存在することが示された。
解説
回転行列 $R(\theta)$ と行列の分解(QR分解)をテーマにした総合問題である。 行列の乗法が一般には非可換であることを踏まえ、(i) (ii) の誘導を通じて「$R(\theta)$ と可換な行列は特定の形に限られる」という事実を引き出している。 (iii) では「逆行列をもつ行列は、回転と各軸方向の伸縮・せん断の合成として表せる」という幾何学的な意味を問い、(iv) でこれらをまとめて方程式 $X^3 = R(\theta)$ の解の個数を判定させている。$\theta=n\pi$ の場合、$R(n\pi) = \pm I$ となり任意の行列と可換になってしまうため、(ii) の絞り込みが適用できず、相似変換を利用して無限の解族を構成するという対比が美しい。
答え
(i)
略(解法1の証明を参照)
(ii)
略(解法1の証明を参照)
(iii)
略(解法1の証明を参照)
(iv)
略(解法1の証明を参照)
この問題の前に見る基礎問題





類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。