九州大学 1982年 文系 第3問 解説
方針・初手
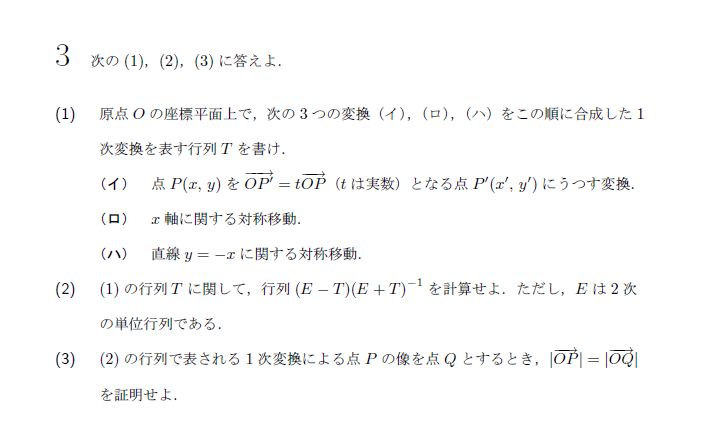
(1) 各変換 (イ), (ロ), (ハ) をそれぞれ行列で表し、それらの積を計算する。複数の1次変換を合成する場合、順序が重要になる。点 $P$ に対して (イ) $\to$ (ロ) $\to$ (ハ) の順に変換を施すことは、列ベクトルに対して左から順に (イ)の行列、(ロ)の行列、(ハ)の行列を掛け合わせることと同じになるため、行列の積としては右から順に書くことに注意する。
(2) (1)で求めた行列 $T$ を式に代入し、逆行列を求めて計算を実行する。
(3) (2)で得られた行列がどのような1次変換を表しているかを調べる。具体的に成分を用いて計算する方法(解法1)と、行列の性質から回転移動であることを示す方法(解法2)がある。
解法1
(1)
変換 (イ), (ロ), (ハ) を表す行列をそれぞれ $A, B, C$ とする。
(イ) は原点を中心とする相似拡大であるから、
$$A = \begin{pmatrix} t & 0 \\ 0 & t \end{pmatrix}$$
となる。
(ロ) は $x$ 軸に関する対称移動であるから、点 $(x, y)$ を $(x, -y)$ に移す。よって、
$$B = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}$$
となる。
(ハ) は直線 $y = -x$ に関する対称移動であるから、点 $(x, y)$ を $(-y, -x)$ に移す。よって、
$$C = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix}$$
となる。
3つの変換を (イ), (ロ), (ハ) の順に合成した変換を表す行列 $T$ は、行列の積 $CBA$ で与えられる。
$$T = CBA = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} t & 0 \\ 0 & t \end{pmatrix}$$
まず $BA$ を計算すると、
$$BA = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} t & 0 \\ 0 & t \end{pmatrix} = \begin{pmatrix} t & 0 \\ 0 & -t \end{pmatrix}$$
したがって、
$$T = C(BA) = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} t & 0 \\ 0 & -t \end{pmatrix} = \begin{pmatrix} 0 & t \\ -t & 0 \end{pmatrix}$$
(2)
(1) より、
$$E - T = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} - \begin{pmatrix} 0 & t \\ -t & 0 \end{pmatrix} = \begin{pmatrix} 1 & -t \\ t & 1 \end{pmatrix}$$
$$E + T = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} + \begin{pmatrix} 0 & t \\ -t & 0 \end{pmatrix} = \begin{pmatrix} 1 & t \\ -t & 1 \end{pmatrix}$$
行列 $E + T$ の行列式は $\det(E+T) = 1 \cdot 1 - t(-t) = 1 + t^2$ である。 $t$ は実数であるから $1 + t^2 \neq 0$ となり、$(E + T)^{-1}$ は存在する。
$$(E + T)^{-1} = \frac{1}{1+t^2} \begin{pmatrix} 1 & -t \\ t & 1 \end{pmatrix}$$
よって、求める行列は
$$(E - T)(E + T)^{-1} = \begin{pmatrix} 1 & -t \\ t & 1 \end{pmatrix} \frac{1}{1+t^2} \begin{pmatrix} 1 & -t \\ t & 1 \end{pmatrix}$$
$$= \frac{1}{1+t^2} \begin{pmatrix} 1 & -t \\ t & 1 \end{pmatrix}^2$$
$$= \frac{1}{1+t^2} \begin{pmatrix} 1 - t^2 & -2t \\ 2t & 1 - t^2 \end{pmatrix}$$
(3)
(2) で求めた行列を $U$ とする。点 $P(x, y)$ の $U$ による像が点 $Q(X, Y)$ であるから、
$$\begin{pmatrix} X \\ Y \end{pmatrix} = \frac{1}{1+t^2} \begin{pmatrix} 1 - t^2 & -2t \\ 2t & 1 - t^2 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \frac{1}{1+t^2} \begin{pmatrix} (1-t^2)x - 2ty \\ 2tx + (1-t^2)y \end{pmatrix}$$
ここで、$|\overrightarrow{OQ}|^2$ を計算する。
$$|\overrightarrow{OQ}|^2 = X^2 + Y^2$$
$$= \frac{1}{(1+t^2)^2} \left\{ \left( (1-t^2)x - 2ty \right)^2 + \left( 2tx + (1-t^2)y \right)^2 \right\}$$
$$= \frac{1}{(1+t^2)^2} \left\{ (1-t^2)^2 x^2 - 4t(1-t^2)xy + 4t^2 y^2 + 4t^2 x^2 + 4t(1-t^2)xy + (1-t^2)^2 y^2 \right\}$$
$$= \frac{1}{(1+t^2)^2} \left\{ \left( (1-t^2)^2 + 4t^2 \right) x^2 + \left( 4t^2 + (1-t^2)^2 \right) y^2 \right\}$$
ここで、係数を整理すると
$$(1-t^2)^2 + 4t^2 = 1 - 2t^2 + t^4 + 4t^2 = 1 + 2t^2 + t^4 = (1+t^2)^2$$
となるから、
$$|\overrightarrow{OQ}|^2 = \frac{1}{(1+t^2)^2} \left\{ (1+t^2)^2 x^2 + (1+t^2)^2 y^2 \right\} = x^2 + y^2$$
一方、$|\overrightarrow{OP}|^2 = x^2 + y^2$ であるから、
$$|\overrightarrow{OQ}|^2 = |\overrightarrow{OP}|^2$$
$|\overrightarrow{OQ}| \geqq 0$, $|\overrightarrow{OP}| \geqq 0$ より、
$$|\overrightarrow{OQ}| = |\overrightarrow{OP}|$$
が成り立つ。
解法2
(3)の別解
(2)で求めた行列を $U$ とする。
$$U = \begin{pmatrix} \frac{1-t^2}{1+t^2} & \frac{-2t}{1+t^2} \\ \frac{2t}{1+t^2} & \frac{1-t^2}{1+t^2} \end{pmatrix}$$
ここで、実数 $t$ に対して
$$\left( \frac{1-t^2}{1+t^2} \right)^2 + \left( \frac{2t}{1+t^2} \right)^2 = \frac{1-2t^2+t^4+4t^2}{(1+t^2)^2} = \frac{(1+t^2)^2}{(1+t^2)^2} = 1$$
が成り立つ。したがって、ある角 $\theta$ を用いて
$$\cos\theta = \frac{1-t^2}{1+t^2}, \quad \sin\theta = \frac{2t}{1+t^2}$$
と表すことができる。このとき、行列 $U$ は
$$U = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}$$
となる。これは原点を中心とする角 $\theta$ の回転を表す行列である。 回転移動は原点からの距離を保つため、任意の点 $P$ とその像 $Q$ について、常に $|\overrightarrow{OP}| = |\overrightarrow{OQ}|$ が成り立つ。
解説
- (1)での「合成する順序」に注意が必要です。(イ) $\to$ (ロ) $\to$ (ハ) の順に変換するということは、ベクトル $\vec{v}$ に対して $C(B(A\vec{v})) = (CBA)\vec{v}$ となるため、行列の積としては $CBA$ となります。
- (3)のように「原点からの距離を保つ」変換(等長変換)は、行列式が $\pm 1$ となる直交行列です。本問で登場する $(E-T)(E+T)^{-1}$ という形は「ケイリー変換(Cayley transform)」と呼ばれ、歪対称行列(本問の $T$ のように転置行列が元の行列の $-1$ 倍になる行列)から直交行列を作り出す方法として大学数学でも頻出の形です。
- 解法2のように「回転行列の形」に気づくことができれば、複雑な成分計算を避けることができ、見通しよく証明できます。
答え
(1)
$$T = \begin{pmatrix} 0 & t \\ -t & 0 \end{pmatrix}$$
(2)
$$(E - T)(E + T)^{-1} = \frac{1}{1+t^2} \begin{pmatrix} 1 - t^2 & -2t \\ 2t & 1 - t^2 \end{pmatrix}$$
(3) 解説の通り。
この問題の前に見る基礎問題



類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。