九州大学 2019年 理系 第4問 解説
方針・初手
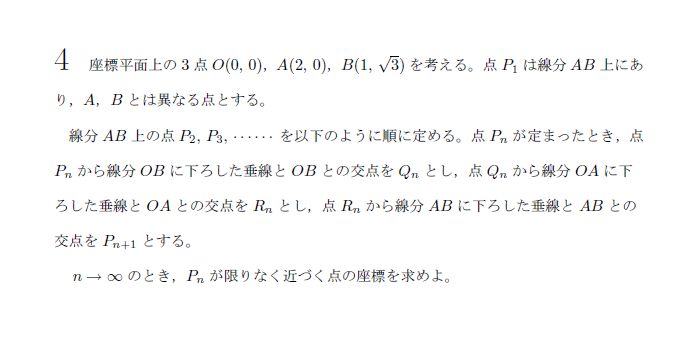
与えられた3点からなる $\triangle OAB$ が正三角形であることに着目する。 点の移動操作は各辺への垂線を下ろす操作の繰り返しであるため、線分の長さ(または位置ベクトル)を用いた数列の漸化式を作成して極限を求めるのが見通しの良い方針となる。
解法1
3点 $O(0, 0)$, $A(2, 0)$, $B(1, \sqrt{3})$ について、各辺の長さを計算すると、 $$ OA = \sqrt{2^2 + 0^2} = 2 $$
$$ OB = \sqrt{1^2 + (\sqrt{3})^2} = 2 $$
$$ AB = \sqrt{(1-2)^2 + (\sqrt{3}-0)^2} = \sqrt{(-1)^2 + 3} = 2 $$
となる。したがって、$\triangle OAB$ は1辺の長さが $2$ の正三角形であり、内角はすべて $60^\circ$ である。
点 $P_n$ は線分 $AB$ 上の点であるため、頂点 $B$ からの距離を $x_n = BP_n$ とおく。 点 $P_1$ は $A, B$ と異なる点であるから、$0 < x_1 < 2$ である。
点 $P_n$ から線分 $OB$ に下ろした垂線の足が $Q_n$ である。 直角三角形 $\triangle BP_n Q_n$ において $\angle B = 60^\circ$ であるから、 $$ BQ_n = BP_n \cos 60^\circ = \frac{1}{2} x_n $$
となる。$0 < x_n < 2$ であれば $0 < BQ_n < 1$ となり、$Q_n$ は線分 $OB$ 上にある。 このとき、$OQ_n$ の長さは、 $$ OQ_n = OB - BQ_n = 2 - \frac{1}{2} x_n $$
である。
次に、点 $Q_n$ から線分 $OA$ に下ろした垂線の足が $R_n$ である。 直角三角形 $\triangle OQ_n R_n$ において $\angle O = 60^\circ$ であるから、 $$ OR_n = OQ_n \cos 60^\circ = \frac{1}{2} \left( 2 - \frac{1}{2} x_n \right) = 1 - \frac{1}{4} x_n $$
となる。このとき、$AR_n$ の長さは、 $$ AR_n = OA - OR_n = 2 - \left( 1 - \frac{1}{4} x_n \right) = 1 + \frac{1}{4} x_n $$
である。
最後に、点 $R_n$ から線分 $AB$ に下ろした垂線の足が $P_{n+1}$ である。 直角三角形 $\triangle AR_n P_{n+1}$ において $\angle A = 60^\circ$ であるから、 $$ AP_{n+1} = AR_n \cos 60^\circ = \frac{1}{2} \left( 1 + \frac{1}{4} x_n \right) = \frac{1}{2} + \frac{1}{8} x_n $$
となる。 点 $P_{n+1}$ の $B$ からの距離 $x_{n+1}$ は、 $$ x_{n+1} = BP_{n+1} = AB - AP_{n+1} = 2 - \left( \frac{1}{2} + \frac{1}{8} x_n \right) = -\frac{1}{8} x_n + \frac{3}{2} $$
と表される。 ここで $0 < x_n < 2$ であれば $\frac{5}{4} < x_{n+1} < \frac{3}{2}$ となり、$0 < x_{n+1} < 2$ を満たす。よって、すべての自然数 $n$ について点 $P_n$ は線分 $AB$ 上に存在することが保証される。
得られた漸化式 $$ x_{n+1} = -\frac{1}{8} x_n + \frac{3}{2} $$
を変形する。特性方程式 $\alpha = -\frac{1}{8}\alpha + \frac{3}{2}$ の解が $\alpha = \frac{4}{3}$ であることから、 $$ x_{n+1} - \frac{4}{3} = -\frac{1}{8} \left( x_n - \frac{4}{3} \right) $$
となる。数列 $\left\{ x_n - \frac{4}{3} \right\}$ は公比 $-\frac{1}{8}$ の等比数列であるため、一般項は $$ x_n - \frac{4}{3} = \left( -\frac{1}{8} \right)^{n-1} \left( x_1 - \frac{4}{3} \right) $$
すなわち、 $$ x_n = \frac{4}{3} + \left( -\frac{1}{8} \right)^{n-1} \left( x_1 - \frac{4}{3} \right) $$
となる。 $n \to \infty$ のとき、公比の絶対値が $1$ より小さいため $\left( -\frac{1}{8} \right)^{n-1} \to 0$ となる。したがって、 $$ \lim_{n \to \infty} x_n = \frac{4}{3} $$
を得る。
これは、$n \to \infty$ のとき点 $P_n$ が、線分 $AB$ 上において $B$ からの距離が $\frac{4}{3}$、$A$ からの距離が $2 - \frac{4}{3} = \frac{2}{3}$ となる点に近づくことを意味する。 すなわち、$P_n$ が限りなく近づく点は、線分 $AB$ を $1 : 2$ に内分する点である。 その点の座標は、 $$ \left( \frac{2 \times 2 + 1 \times 1}{1 + 2}, \frac{2 \times 0 + 1 \times \sqrt{3}}{1 + 2} \right) = \left( \frac{5}{3}, \frac{\sqrt{3}}{3} \right) $$
と求められる。
解法2
位置ベクトルを用いて漸化式を立てる。 $\vec{OA} = \vec{a}$, $\vec{OB} = \vec{b}$ とおく。 $\triangle OAB$ は1辺の長さが $2$ の正三角形であるから、 $$ |\vec{a}| = |\vec{b}| = 2, \quad \vec{a} \cdot \vec{b} = 2 \times 2 \times \cos 60^\circ = 2 $$
である。 点 $P_n$ は線分 $AB$ 上の点であるから、実数 $t_n$ を用いて $$ \vec{OP_n} = (1 - t_n) \vec{a} + t_n \vec{b} $$
と表せる。 点 $Q_n$ は線分 $OB$ 上の点であるから、実数 $k$ を用いて $\vec{OQ_n} = k \vec{b}$ とおける。 $P_n Q_n \perp OB$ より、$\vec{P_n Q_n} \cdot \vec{b} = 0$ である。 $$ \vec{P_n Q_n} = \vec{OQ_n} - \vec{OP_n} = -(1 - t_n) \vec{a} + (k - t_n) \vec{b} $$
これを内積の条件に代入すると、 $$ -(1 - t_n) (\vec{a} \cdot \vec{b}) + (k - t_n) |\vec{b}|^2 = 0 $$
$$ -2(1 - t_n) + 4(k - t_n) = 0 $$
整理すると $4k = 2 + 2t_n$ となり、$k = \frac{1 + t_n}{2}$ を得る。 よって、 $$ \vec{OQ_n} = \frac{1 + t_n}{2} \vec{b} $$
である。
次に、点 $R_n$ は線分 $OA$ 上の点であるから、実数 $l$ を用いて $\vec{OR_n} = l \vec{a}$ とおける。 $Q_n R_n \perp OA$ より、$\vec{Q_n R_n} \cdot \vec{a} = 0$ である。 $$ \vec{Q_n R_n} = \vec{OR_n} - \vec{OQ_n} = l \vec{a} - \frac{1 + t_n}{2} \vec{b} $$
内積の条件に代入して、 $$ l |\vec{a}|^2 - \frac{1 + t_n}{2} (\vec{a} \cdot \vec{b}) = 0 $$
$$ 4l - \frac{1 + t_n}{2} \times 2 = 0 $$
よって $l = \frac{1 + t_n}{4}$ となり、 $$ \vec{OR_n} = \frac{1 + t_n}{4} \vec{a} $$
を得る。
最後に、点 $P_{n+1}$ は線分 $AB$ 上の点であるから $\vec{OP_{n+1}} = (1 - t_{n+1}) \vec{a} + t_{n+1} \vec{b}$ と表せる。 $R_n P_{n+1} \perp AB$ であり、直線 $AB$ の方向ベクトルは $\vec{b} - \vec{a}$ であるから、$\vec{R_n P_{n+1}} \cdot (\vec{b} - \vec{a}) = 0$ である。 $$ \begin{aligned} \vec{R_n P_{n+1}} &= \vec{OP_{n+1}} - \vec{OR_n} \\ &= \left( 1 - t_{n+1} - \frac{1 + t_n}{4} \right) \vec{a} + t_{n+1} \vec{b} \end{aligned} $$
内積の条件に代入して計算する。 $$ \left\{ \left( 1 - t_{n+1} - \frac{1 + t_n}{4} \right) \vec{a} + t_{n+1} \vec{b} \right\} \cdot (\vec{b} - \vec{a}) = 0 $$
$$ \left( 1 - t_{n+1} - \frac{1 + t_n}{4} \right) (\vec{a} \cdot \vec{b} - |\vec{a}|^2) + t_{n+1} (|\vec{b}|^2 - \vec{a} \cdot \vec{b}) = 0 $$
$\vec{a} \cdot \vec{b} - |\vec{a}|^2 = 2 - 4 = -2$ および $|\vec{b}|^2 - \vec{a} \cdot \vec{b} = 4 - 2 = 2$ より、 $$ -2 \left( 1 - t_{n+1} - \frac{1 + t_n}{4} \right) + 2 t_{n+1} = 0 $$
両辺を $2$ で割って整理すると、 $$ -\left( 1 - \frac{1 + t_n}{4} \right) + 2 t_{n+1} = 0 $$
$$ 2 t_{n+1} = \frac{3 - t_n}{4} $$
$$ t_{n+1} = -\frac{1}{8} t_n + \frac{3}{8} $$
特性方程式 $\alpha = -\frac{1}{8}\alpha + \frac{3}{8}$ の解は $\alpha = \frac{1}{3}$ であるから、 $$ t_{n+1} - \frac{1}{3} = -\frac{1}{8} \left( t_n - \frac{1}{3} \right) $$
と変形できる。$n \to \infty$ のとき公比 $-\frac{1}{8}$ の等比数列部分は $0$ に収束するため、 $$ \lim_{n \to \infty} t_n = \frac{1}{3} $$
となる。 したがって、極限における位置ベクトルは、 $$ \lim_{n \to \infty} \vec{OP_n} = \left( 1 - \frac{1}{3} \right) \vec{a} + \frac{1}{3} \vec{b} = \frac{2}{3} \vec{a} + \frac{1}{3} \vec{b} $$
となる。成分表示に直すと、 $$ \frac{2}{3} (2, 0) + \frac{1}{3} (1, \sqrt{3}) = \left( \frac{5}{3}, \frac{\sqrt{3}}{3} \right) $$
と求められる。
解説
与えられた座標から $\triangle OAB$ が正三角形であることに気付けるかどうかが、計算量を大きく左右する問題である。 直線の式を用いて交点の座標を直接計算していくことも理論上は可能だが、式が非常に煩雑になり計算ミスのリスクが高まる。 解法1のように図形的性質($60^\circ$ をもつ直角三角形の辺の比)を利用して1次元の長さの漸化式に落とし込むか、解法2のようにベクトルを用いて機械的に内積処理を行うのが確実なアプローチである。
答え
$$ \left( \frac{5}{3}, \frac{\sqrt{3}}{3} \right) $$
この問題の前に見る基礎問題

類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。