名古屋大学 1989年 理系 第3問 解説
方針・初手
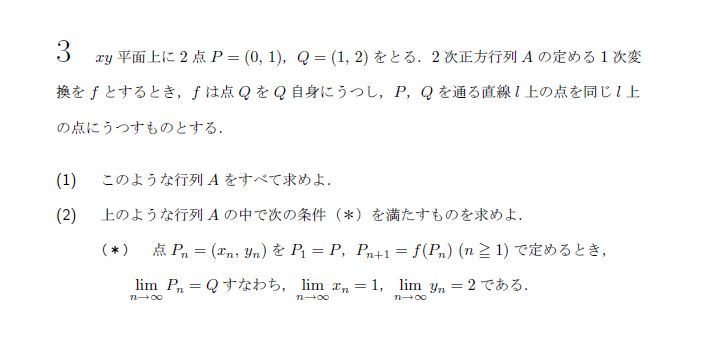
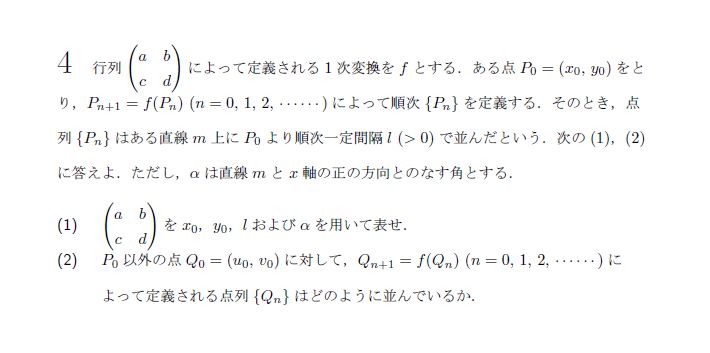
行列による1次変換が直線 $l$ を直線 $l$ にうつすという条件をどのように数式化するかがポイントです。 まずは2点 $P(0, 1)$, $Q(1, 2)$ を通る直線 $l$ の方程式を求めます。 (1) については、行列 $A$ の成分を文字でおいて $l$ 上の任意の点が $l$ 上の点にうつるという条件を恒等式として処理する方針(解法1)と、$l$ の方向ベクトルに着目し、固有値・固有ベクトルの考え方を利用する方針(解法2)があります。 (2) については、(1) で求めた行列 $A$ を用いて点 $P_n$ の座標や位置ベクトルの漸化式を立て、極限の条件を満たすようなパラメータの範囲を求めます。
解法1
(1)
2点 $P(0, 1)$, $Q(1, 2)$ を通る直線 $l$ の傾きは $\frac{2-1}{1-0} = 1$ であり、$y$ 切片が $1$ であるから、直線 $l$ の方程式は $$ y = x + 1 $$ である。 行列 $A$ を $A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$ とおく。 $f$ は点 $Q$ を $Q$ 自身にうつすので、$A \begin{pmatrix} 1 \\ 2 \end{pmatrix} = \begin{pmatrix} 1 \\ 2 \end{pmatrix}$ が成り立つ。よって、
$$ \begin{cases} a + 2b = 1 \\ c + 2d = 2 \end{cases} $$
直線 $l$ 上の任意の点は、実数 $t$ を用いて $(t, t+1)$ と表される。この点の $f$ による像を $(X, Y)$ とすると、
$$ \begin{pmatrix} X \\ Y \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} t \\ t+1 \end{pmatrix} = \begin{pmatrix} at + b(t+1) \\ ct + d(t+1) \end{pmatrix} $$
この像 $(X, Y)$ も直線 $l$ 上にあるので、$Y = X + 1$ が成り立つ。 すなわち、
$$ ct + d(t+1) = at + b(t+1) + 1 $$
整理すると、
$$ (c + d - a - b)t + (d - b - 1) = 0 $$
これがすべての実数 $t$ について成り立つので、
$$ \begin{cases} c + d - a - b = 0 \\ d - b - 1 = 0 \end{cases} $$
第2式より $d = b + 1$。 これを $c + 2d = 2$ に代入して、$c + 2(b + 1) = 2$ より $c = -2b$。 さらに $a + 2b = 1$ より $a = 1 - 2b$。 これらの $a, c, d$ を $c + d - a - b = 0$ に代入すると、
$$ (-2b) + (b + 1) - (1 - 2b) - b = 0 $$
となり、矛盾なく成り立つ。 したがって、求める行列 $A$ は実数 $b$ を用いて次のように表される。
$$ A = \begin{pmatrix} 1-2b & b \\ -2b & b+1 \end{pmatrix} $$
(2)
点 $P_n = (x_n, y_n)$ とおく。$P_n$ は常に直線 $l$ 上にあるため、$y_n = x_n + 1$ が成り立つ。 $P_{n+1} = f(P_n)$ より、
$$ \begin{pmatrix} x_{n+1} \\ y_{n+1} \end{pmatrix} = \begin{pmatrix} 1-2b & b \\ -2b & b+1 \end{pmatrix} \begin{pmatrix} x_n \\ y_n \end{pmatrix} $$
$x$ 座標に注目すると、
$$ x_{n+1} = (1-2b)x_n + b y_n $$
$y_n = x_n + 1$ を代入して、
$$ \begin{aligned} x_{n+1} &= (1-2b)x_n + b(x_n + 1) \\ &= (1-b)x_n + b \end{aligned} $$
この漸化式を変形すると、
$$ x_{n+1} - 1 = (1-b)(x_n - 1) $$
よって、数列 $\{x_n - 1\}$ は初項 $x_1 - 1 = 0 - 1 = -1$、公比 $1-b$ の等比数列であるから、
$$ x_n - 1 = -(1-b)^{n-1} $$
$$ x_n = 1 - (1-b)^{n-1} $$
ここで、$\lim_{n \to \infty} P_n = Q(1, 2)$、すなわち $\lim_{n \to \infty} x_n = 1$ となるための条件は、$\lim_{n \to \infty} (1-b)^{n-1} = 0$ となることである。 したがって、公比 $1-b$ が満たすべき条件は、
$$ -1 < 1-b < 1 $$
これを解いて、
$$ 0 < b < 2 $$
(このとき、$y_n = x_n + 1$ より $\lim_{n \to \infty} y_n = 2$ も満たされる) よって、求める行列 $A$ は、
$$ A = \begin{pmatrix} 1-2b & b \\ -2b & b+1 \end{pmatrix} \quad (ただし、0 < b < 2) $$
解法2
(1)
点 $Q, P$ の位置ベクトルをそれぞれ $\vec{q} = \begin{pmatrix} 1 \\ 2 \end{pmatrix}$, $\vec{p} = \begin{pmatrix} 0 \\ 1 \end{pmatrix}$ とし、直線 $l$ の方向ベクトルを $\vec{d} = \vec{q} - \vec{p} = \begin{pmatrix} 1 \\ 1 \end{pmatrix}$ とする。 直線 $l$ 上の任意の点は、実数 $t$ を用いて $\vec{q} + t\vec{d}$ と表せる。 条件より $f(Q) = Q$ であるから、
$$ A\vec{q} = \vec{q} $$
また、$f$ は直線 $l$ 上の点を $l$ 上の点にうつすため、$A(\vec{q} + t\vec{d})$ も $l$ 上にある。すなわち、ある実数 $s$ が存在して、
$$ A(\vec{q} + t\vec{d}) = \vec{q} + s\vec{d} $$
が成り立つ。$A\vec{q} = \vec{q}$ を用いると、
$$ \vec{q} + tA\vec{d} = \vec{q} + s\vec{d} $$
$$ tA\vec{d} = s\vec{d} $$
これが任意の $t$ に対して成り立つためには、ベクトル $A\vec{d}$ が $\vec{d}$ と平行でなければならない。 したがって、ある実数 $k$ を用いて $A\vec{d} = k\vec{d}$ と表せる。 以上より、行列 $A$ は次を満たす。
$$ A \begin{pmatrix} 1 & 1 \\ 2 & 1 \end{pmatrix} = \begin{pmatrix} 1 & k \\ 2 & k \end{pmatrix} $$
逆行列を右から掛けて $A$ を求める。
$$ \begin{pmatrix} 1 & 1 \\ 2 & 1 \end{pmatrix}^{-1} = \frac{1}{1-2} \begin{pmatrix} 1 & -1 \\ -2 & 1 \end{pmatrix} = \begin{pmatrix} -1 & 1 \\ 2 & -1 \end{pmatrix} $$
$$ \begin{aligned} A &= \begin{pmatrix} 1 & k \\ 2 & k \end{pmatrix} \begin{pmatrix} -1 & 1 \\ 2 & -1 \end{pmatrix} \\ &= \begin{pmatrix} 2k-1 & 1-k \\ 2k-2 & 2-k \end{pmatrix} \end{aligned} $$
(これは解法1の $A$ において $b = 1-k$ とおいたものに等しい)
(2)
点 $P_n$ の位置ベクトルを $\vec{p}_n$ とすると、$\vec{p}_1 = \vec{p} = \vec{q} - \vec{d}$ である。 $P_{n+1} = f(P_n)$ より $\vec{p}_{n+1} = A\vec{p}_n$ であるから、
$$ \vec{p}_n = A^{n-1} \vec{p}_1 = A^{n-1} (\vec{q} - \vec{d}) = A^{n-1}\vec{q} - A^{n-1}\vec{d} $$
ここで、$A\vec{q} = \vec{q}$ および $A\vec{d} = k\vec{d}$ であるから、
$$ \begin{aligned} A^{n-1}\vec{q} &= \vec{q} \\ A^{n-1}\vec{d} &= k^{n-1}\vec{d} \end{aligned} $$
よって、
$$ \vec{p}_n = \vec{q} - k^{n-1}\vec{d} $$
成分で表すと、
$$ \begin{pmatrix} x_n \\ y_n \end{pmatrix} = \begin{pmatrix} 1 \\ 2 \end{pmatrix} - k^{n-1} \begin{pmatrix} 1 \\ 1 \end{pmatrix} = \begin{pmatrix} 1 - k^{n-1} \\ 2 - k^{n-1} \end{pmatrix} $$
$\lim_{n \to \infty} P_n = Q$ となるための条件は、$\lim_{n \to \infty} k^{n-1} = 0$ となることである。 したがって、公比 $k$ が満たすべき条件は、
$$ -1 < k < 1 $$
求める行列 $A$ は、
$$ A = \begin{pmatrix} 2k-1 & 1-k \\ 2k-2 & 2-k \end{pmatrix} \quad (ただし、-1 < k < 1) $$
解説
直線を直線にうつす1次変換の典型問題です。 解法1のように成分表示をして恒等式に持ち込む方法は、どのような問題設定でも通用しやすい汎用性があります。 一方、解法2のように直線の「通る1点」と「方向ベクトル」に分けて考える方法は、計算量が減り見通しが良くなるため、行列とベクトルの関係を深く理解するのに非常に有効です。特定の点が自身にうつる(固定点)場合や、直線を直線にうつす条件を固有値・固有ベクトルの視点で捉え直す練習として最適な問題です。
答え
(1) 任意の実数 $b$ (または $k$) を用いて、 $A = \begin{pmatrix} 1-2b & b \\ -2b & b+1 \end{pmatrix}$ または $A = \begin{pmatrix} 2k-1 & 1-k \\ 2k-2 & 2-k \end{pmatrix}$
(2) $0 < b < 2$ (または $-1 < k < 1$) を満たす実数を用いて、 $A = \begin{pmatrix} 1-2b & b \\ -2b & b+1 \end{pmatrix}$ または $A = \begin{pmatrix} 2k-1 & 1-k \\ 2k-2 & 2-k \end{pmatrix}$
この問題の前に見る基礎問題

類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。