大阪大学 1989年 文系 第1問 解説
方針・初手
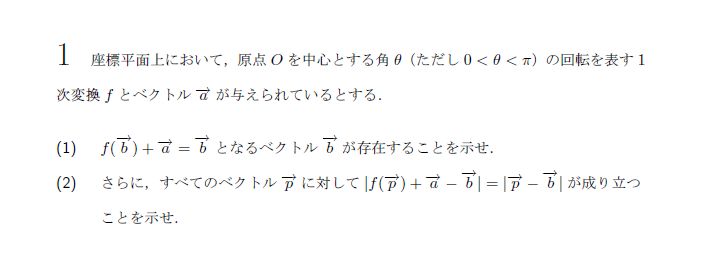
1次変換 $f$ は原点を中心とする角 $\theta$ の回転であるため、行列表示して考えるのが確実である。
(1)
$f(\vec{b}) + \vec{a} = \vec{b}$ を $\vec{b}$ についての方程式とみなし、係数行列が正則(逆行列をもつ)であることを示す。
(2) (1) の結果( $\vec{a} = \vec{b} - f(\vec{b})$ )を代入して式を整理し、回転移動が線形変換であり、かつベクトルの大きさを変えない性質(等長変換)を持つことを利用する。
解法1
(1)
1次変換 $f$ を表す行列を $R$ とすると、$R$ は原点を中心とする角 $\theta$ の回転を表すので、
$$ R = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} $$
とかける。また、$E$ を2次の単位行列とする。
条件式 $f(\vec{b}) + \vec{a} = \vec{b}$ を行列を用いて表すと、
$$ R\vec{b} + \vec{a} = \vec{b} $$
となる。これを変形すると、
$$ (E - R)\vec{b} = \vec{a} $$
ここで、行列 $E - R$ は以下のようになる。
$$ E - R = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} - \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} = \begin{pmatrix} 1-\cos\theta & \sin\theta \\ -\sin\theta & 1-\cos\theta \end{pmatrix} $$
この行列の行列式を $\Delta$ とすると、
$$ \Delta = (1-\cos\theta)^2 - (\sin\theta)(-\sin\theta) = 1 - 2\cos\theta + \cos^2\theta + \sin^2\theta = 2 - 2\cos\theta = 2(1 - \cos\theta) $$
問題の条件より $0 < \theta < \pi$ であるから、$-1 < \cos\theta < 1$ であり、$\cos\theta \neq 1$ である。
したがって $\Delta > 0$ となり、$\Delta \neq 0$ であるから、行列 $E - R$ は逆行列 $(E - R)^{-1}$ をもつ。
ゆえに、$\vec{b} = (E - R)^{-1}\vec{a}$ とすれば、条件を満たすベクトル $\vec{b}$ がただ1つ存在することが示された。
(2)
(1) より、$f(\vec{b}) + \vec{a} = \vec{b}$ であるから、
$$ \vec{a} = \vec{b} - f(\vec{b}) $$
が成り立つ。これを証明すべき式の左辺の $\vec{a}$ に代入すると、
$$ f(\vec{p}) + \vec{a} - \vec{b} = f(\vec{p}) + \{ \vec{b} - f(\vec{b}) \} - \vec{b} = f(\vec{p}) - f(\vec{b}) $$
となる。ここで、$f$ は1次変換(線形変換)であるため、
$$ f(\vec{p}) - f(\vec{b}) = f(\vec{p} - \vec{b}) $$
が成り立つ。
さらに、$f$ は原点を中心とする回転を表す変換であるから、任意のベクトル $\vec{v}$ に対して、変換前後でベクトルの大きさは変化せず、
$$ |f(\vec{v})| = |\vec{v}| $$
が成り立つ(等長変換の性質)。
したがって、$\vec{v} = \vec{p} - \vec{b}$ とおくことで、
$$ |f(\vec{p} - \vec{b})| = |\vec{p} - \vec{b}| $$
となる。
以上の式変形より、
$$ |f(\vec{p}) + \vec{a} - \vec{b}| = |f(\vec{p} - \vec{b})| = |\vec{p} - \vec{b}| $$
となり、すべてのベクトル $\vec{p}$ に対して与式が成り立つことが示された。
解説
回転や対称移動のような幾何学的な意味を持つ1次変換の性質を問う、標準的な問題である。
(1) は、ベクトルの方程式を「行列を用いた連立1次方程式」として捉え直し、逆行列の存在条件(行列式 $\neq 0$)を考えるのが典型的な処理である。角度 $\theta$ の範囲が与えられている理由が、行列式が $0$ にならないことを保証するためであると気づける。
(2) は、代入して式を整理するだけであるが、解答を記述するうえでは「1次変換の線形性( $f(\vec{x}+\vec{y})=f(\vec{x})+f(\vec{y})$ や $f(k\vec{x})=kf(\vec{x})$ など)」と「回転移動の等長性(大きさを変えない性質)」の2点を明確に分けて論拠を述べる必要がある。ここを曖昧にすると、論理に飛躍があると見なされるおそれがある。
答え
(1)
1次変換 $f$ を表す行列を $R$ とおき、方程式を $(E - R)\vec{b} = \vec{a}$ と変形したうえで、$0 < \theta < \pi$ より係数行列 $E - R$ が正則であることを示し、条件を満たす $\vec{b}$ の存在を示した。
(2)
(1)
の関係式を用いて左辺を変形し、$f$ の線形性から $f(\vec{p} - \vec{b})$ を導き、回転変換がベクトルの大きさを保存する性質を利用して等式が成り立つことを示した。
この問題の前に見る基礎問題





類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。