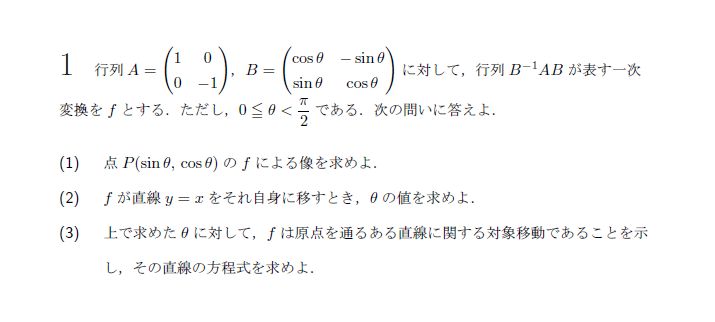
東北大学 1995年 理系 第1問 解説
方針・初手
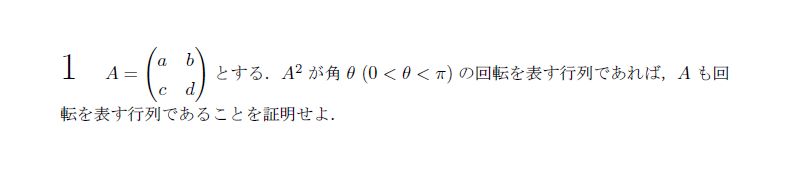
$A^2$ が回転を表す行列であるなら、$A^2=R_\theta$ と書ける。ここで
$$ R_\theta= \begin{pmatrix} \cos\theta & -\sin\theta\ \sin\theta & \cos\theta \end{pmatrix} \qquad (0<\theta<\pi) $$
である。
まず $A$ は $A^2$ と可換であるから、$A$ は $R_\theta$ と可換である。この条件から $A$ の形を絞り、その後 $A^2=R_\theta$ を使って $A$ 自身が回転行列の形になることを示す。
解法1
$A=\begin{pmatrix}a&b\ c&d\end{pmatrix}$ とおく。
$A^2=R_\theta$ であるから
$$ AR_\theta=A(A^2)=A^3=(A^2)A=R_\theta A $$
が成り立つ。よって $AR_\theta$ と $R_\theta A$ を計算して比較する。
まず
$$ AR_\theta= \begin{pmatrix} a\cos\theta+b\sin\theta & -a\sin\theta+b\cos\theta\ c\cos\theta+d\sin\theta & -c\sin\theta+d\cos\theta \end{pmatrix}, $$
また
$$ R_\theta A= \begin{pmatrix} a\cos\theta-c\sin\theta & b\cos\theta-d\sin\theta\ a\sin\theta+c\cos\theta & b\sin\theta+d\cos\theta \end{pmatrix} $$
である。
これらが等しいので、対応する成分を比較すると
$$ b\sin\theta=-c\sin\theta,\qquad -a\sin\theta=-d\sin\theta $$
を得る。ここで $0<\theta<\pi$ より $\sin\theta\neq0$ であるから、
$$ b=-c,\qquad a=d $$
となる。
したがって $A$ は
$$ A= \begin{pmatrix} x & -y\ y & x \end{pmatrix} $$
の形に書ける。ただし $x=a,\ y=c$ とした。
次に $A^2$ を計算すると
$$ A^2= \begin{pmatrix} x^2-y^2 & -2xy\ 2xy & x^2-y^2 \end{pmatrix} $$
である。これが $R_\theta$ に等しいから、
$$ x^2-y^2=\cos\theta,\qquad 2xy=\sin\theta $$
を得る。
ここで両式を用いると
$$ (x^2+y^2)^2=(x^2-y^2)^2+(2xy)^2=\cos^2\theta+\sin^2\theta=1 $$
となる。$x^2+y^2\ge0$ であるから
$$ x^2+y^2=1 $$
である。
よって、ある実数 $\varphi$ が存在して
$$ x=\cos\varphi,\qquad y=\sin\varphi $$
と書ける。したがって
$$ A= \begin{pmatrix} \cos\varphi & -\sin\varphi\ \sin\varphi & \cos\varphi \end{pmatrix} $$
となり、$A$ は角 $\varphi$ の回転を表す行列である。
さらに
$$ \cos 2\varphi=x^2-y^2=\cos\theta,\qquad \sin 2\varphi=2xy=\sin\theta $$
より
$$ 2\varphi\equiv\theta \pmod{2\pi} $$
である。すなわち $\varphi\equiv \dfrac{\theta}{2}\pmod{\pi}$ である。
解説
鍵は、$A^2$ が非自明な回転行列であることから、$A$ がその回転行列と可換になる点である。平面の回転行列と可換な実 $2\times2$ 行列は
$$ \begin{pmatrix} x & -y\\ y & x \end{pmatrix} $$
の形に限られる。この形まで落とせば、あとは $A^2=R_\theta$ から $x^2+y^2=1$ を導くだけで、$A$ が回転行列であることが分かる。
答え
$A^2$ が角 $\theta\ (0<\theta<\pi)$ の回転を表すならば、
$$ A= \begin{pmatrix} \cos\varphi & -\sin\varphi\\ \sin\varphi & \cos\varphi \end{pmatrix} \qquad \left(2\varphi\equiv\theta\pmod{2\pi}\right) $$
と書ける。したがって、$A$ も回転を表す行列である。
この問題の前に見る基礎問題





類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。