大阪大学 1999年 理系 第3問 解説
方針・初手
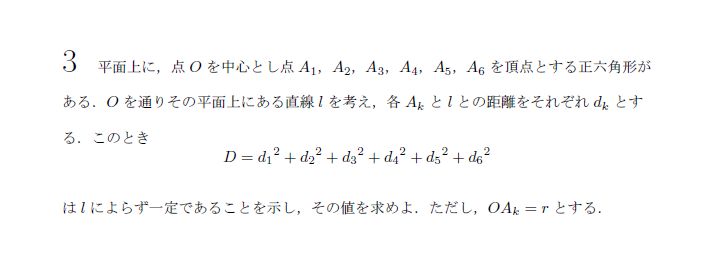
点 $O$ を原点とする座標系を設定し、直線 $l$ と正六角形の相対的な位置関係を数式に落とし込むことが第一歩である。
直線 $l$ の位置に関わらず一定であることを示すため、計算が容易になるように直線を固定して図形を動かす(またはその逆の)座標設定を行うとよい。ここでは、直線 $l$ を座標軸($x$ 軸または実軸)に合わせ、正六角形を角 $\alpha$ だけ回転させた状態で配置することで、距離 $d_k$ を立式する。
解法1
点 $O$ を原点とする $xy$ 平面を設定し、直線 $l$ を $x$ 軸とする。
正六角形の1つの頂点 $A_1$ の動径が $x$ 軸の正の向きとなす角を $\alpha$ とすると、各頂点 $A_k$ ($k=1, 2, 3, 4, 5, 6$) の座標は極座標表示を用いて以下のように表される。
$$ A_k \left( r \cos\left(\alpha + \frac{k-1}{3}\pi\right), r \sin\left(\alpha + \frac{k-1}{3}\pi\right) \right) $$
点 $A_k$ と $x$ 軸(直線 $l$)との距離 $d_k$ は、$A_k$ の $y$ 座標の絶対値に等しいため、その2乗は以下のようになる。
$$ d_k^2 = r^2 \sin^2\left(\alpha + \frac{k-1}{3}\pi\right) $$
ここで、$k=4, 5, 6$ のとき、$\sin(\theta + \pi) = -\sin\theta$ より $\sin^2(\theta + \pi) = \sin^2\theta$ であることを用いると、
$$ d_4^2 = d_1^2, \quad d_5^2 = d_2^2, \quad d_6^2 = d_3^2 $$
が成り立つ。したがって、求める和 $D$ は
$$ D = 2(d_1^2 + d_2^2 + d_3^2) = 2r^2 \left\{ \sin^2\alpha + \sin^2\left(\alpha + \frac{\pi}{3}\right) + \sin^2\left(\alpha + \frac{2\pi}{3}\right) \right\} $$
となる。半角の公式 $\sin^2\theta = \frac{1-\cos 2\theta}{2}$ を適用して次数を下げる。
$$ D = 2r^2 \left\{ \frac{1 - \cos 2\alpha}{2} + \frac{1 - \cos\left(2\alpha + \frac{2\pi}{3}\right)}{2} + \frac{1 - \cos\left(2\alpha + \frac{4\pi}{3}\right)}{2} \right\} $$
$$ = r^2 \left\{ 3 - \left( \cos 2\alpha + \cos\left(2\alpha + \frac{2\pi}{3}\right) + \cos\left(2\alpha + \frac{4\pi}{3}\right) \right) \right\} $$
カッコ内の第2項と第3項に和と差の積の公式 $\cos A + \cos B = 2 \cos\frac{A+B}{2} \cos\frac{A-B}{2}$ を用いる。
$$ \cos\left(2\alpha + \frac{2\pi}{3}\right) + \cos\left(2\alpha + \frac{4\pi}{3}\right) = 2 \cos\left(2\alpha + \pi\right) \cos\left(-\frac{\pi}{3}\right) $$
$$ = -2 \cos 2\alpha \cdot \frac{1}{2} = -\cos 2\alpha $$
これを与式に代入すると、
$$ D = r^2 \left\{ 3 - \left( \cos 2\alpha - \cos 2\alpha \right) \right\} = 3r^2 $$
この結果には $\alpha$ が含まれていないため、$D$ の値は直線 $l$ のとり方によらず一定である。
解法2
点 $O$ を原点とする複素数平面を設定し、直線 $l$ を実軸とする。
正六角形の頂点 $A_1$ を表す複素数の偏角を $\alpha$ とすると、各頂点 $A_k$ を表す複素数 $z_k$ は
$$ z_k = r e^{i\left(\alpha + \frac{k-1}{3}\pi\right)} \quad (k=1, 2, \dots, 6) $$
と表される。点 $A_k$ と実軸(直線 $l$)との距離 $d_k$ は、$z_k$ の虚部の絶対値に等しい。複素数 $z$ の虚部は $\frac{z - \bar{z}}{2i}$ であるため、
$$ d_k^2 = \left| \frac{z_k - \overline{z_k}}{2i} \right|^2 = -\frac{1}{4} \left( z_k - \overline{z_k} \right)^2 = -\frac{1}{4} \left( z_k^2 - 2z_k\overline{z_k} + \overline{z_k}^2 \right) $$
$z_k\overline{z_k} = |z_k|^2 = r^2$ であるから、
$$ d_k^2 = \frac{1}{4} \left( 2r^2 - z_k^2 - \overline{z_k}^2 \right) $$
これを $k=1$ から $6$ まで足し合わせる。
$$ D = \frac{1}{4} \sum_{k=1}^6 (2r^2) - \frac{1}{4} \sum_{k=1}^6 z_k^2 - \frac{1}{4} \sum_{k=1}^6 \overline{z_k}^2 = 3r^2 - \frac{1}{4} \sum_{k=1}^6 z_k^2 - \frac{1}{4} \overline{\sum_{k=1}^6 z_k^2} $$
ここで、$z_k^2$ の和を計算する。$z_k^2 = r^2 e^{2i\alpha} \cdot e^{i\frac{2(k-1)}{3}\pi}$ であり、$\omega = e^{i\frac{2}{3}\pi}$ とおくと、$\omega^3=1$ かつ $\omega \neq 1$ より $1+\omega+\omega^2=0$ である。
$$ \sum_{k=1}^6 z_k^2 = r^2 e^{2i\alpha} \sum_{k=1}^6 \omega^{k-1} = r^2 e^{2i\alpha} (1 + \omega + \omega^2 + \omega^3 + \omega^4 + \omega^5) $$
$$ = r^2 e^{2i\alpha} \cdot 2(1 + \omega + \omega^2) = 0 $$
したがって、$\sum_{k=1}^6 z_k^2 = 0$ であり、その共役複素数も $0$ となるため、
$$ D = 3r^2 - 0 - 0 = 3r^2 $$
この結果から、$D$ は $\alpha$ に依存せず、直線 $l$ のとり方によらず一定であることが示された。
解説
正多角形と直線の距離に関する対称性を利用した典型的な証明問題である。
直接成分で計算する場合、2乗の和の処理に三角関数の次数下げ(半角の公式)が不可欠となる。また、複数項の和が $0$ になることを示す場面では、和と差の積の公式やベクトルの和の図形的意味(正三角形をなすベクトルの和は $\vec{0}$)を利用すると見通しが良くなる。
解法2のように複素数平面を用いると、正多角形の頂点が等比数列として表されるため、和の計算が非常に簡潔に済む。回転の対称性が強い問題では、複素数を用いる解法が強力な武器となる。
答え
$D$ は直線 $l$ によらず一定であり、その値は $3r^2$ である。
この問題の前に見る基礎問題



類題
自分の記録
誤りを報告
解説の誤り、誤字、表示崩れに気づいた場合は送信してください。ログイン不要です。